一、简述 机器人控制系统是一个复杂设计,针对不同功能目标有不同的开发路线,若想开发一个通用的控制系统难度会非常高,因此确定目标需求非常重要,这里所述的目标需求有两种,一种为开发基本的控制系统再根据实际条件进行功能添加开发,另外一种为针对特殊情况开发……继续阅读 » white_Learner 5年前 (2021-04-26) 3355浏览 0评论791个赞
插件配置一、准备工作二、创建一个API三、测试消息传递API……继续阅读 » 我是。 5年前 (2021-04-26) 3084浏览 0评论1442个赞
连接ros添加ROS插件在ROS中控制Velodyne 在之前的文章中,我们构建的Velodyne传感器已经具……继续阅读 » 我是。 5年前 (2021-04-26) 2855浏览 0评论536个赞
ur机械臂 + robotiq gripper + robotiq ft sensor + gazebo + 连接真实机械臂 + 网页控制仓库地址:[ur_ws](https://github.com/borninfreedom/ur_……继续阅读 » bug404 5年前 (2021-04-26) 2205浏览 0评论1211个赞
6,视觉算法 这里我以OpenCv中的SIFT描述子检测目标物体相对于相机的位姿。这里有个开源的包。find_object_2d是ROS平台下一个功能强大的识别物体的功能包。由于对于纯颜色物体具有很少的特征,所以我决定把另外两个物快……继续阅读 » 光头明明 5年前 (2021-04-26) 3269浏览 0评论2589个赞
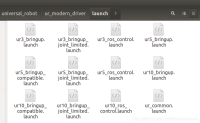
结论: 相比于老的ur5_bringup.launch来控制机械臂可以更加柔顺的控制UR5机械臂。但是也存在规划时出现失败的情况,需要多次plan。具体怎么柔顺我会具体说明一下: 那末怎么使用呢? ……继续阅读 » 光头明明 5年前 (2021-04-26) 2327浏览 0评论846个赞
获取RRbot模型 1、获取RRbot模型2、在rviz中查看……继续阅读 » 我是。 5年前 (2021-04-26) 3085浏览 0评论2818个赞
一. 前言 上一篇中详细阐述了MATLAB系统辨识工具箱的使用实例,本篇将以多旋翼飞行器为研究对象,详细阐述其刚体动力学模型、飞行控制刚体模型以及控制效率模型。最后,针对多旋翼飞行器控制系统设计当中的主要系统辨识问题进行解析。 ……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1482浏览 0评论1184个赞
一. 前言 上一篇文章中,我们对多旋翼飞行器进行了详细的建模,对其刚体动力学模型、刚体运动学模型以及控制效率模型进行了详细的介绍,了解建模对于多旋翼飞行器控制系统设计的重要性,建模以及系统辨识技术在多旋翼飞行器设计中起到的作用。 &nbs……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2606浏览 0评论1819个赞
1 创建一个package catkin_create_pkg myurdf joint_state_controller robot_state_publ……继续阅读 » bbtang5568 5年前 (2021-04-26) 1773浏览 0评论394个赞
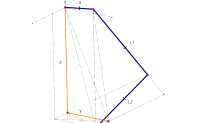
本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 一、运动学 不考虑横向髋关节运动时,四足机器人的腿……继续阅读 » 我是。 5年前 (2021-04-26) 3706浏览 0评论1790个赞
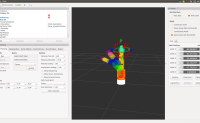
底层的电机控制已经基本完成,还需要解决的最后一个问题就是根据机械臂的运动,将机械臂的位姿状态信息发回到上位机的ROS,让RVIZ中的机械臂和现实中的机械臂保持一致。 目前没有反馈的信息发回到上位机,所以每当点击 Update ,然后Plan and Execute之……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3741浏览 0评论2698个赞
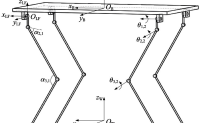
URDF文件通过check_urdf pan_tilt.urdf检测是正确的: robot name is: pan_tilt---------- Success……继续阅读 » bbtang5568 5年前 (2021-04-26) 1760浏览 0评论621个赞
要建立自己的自主机器人,首先,必须要建立自己的机器人模型,URDF(Unified Robot Description Format)模型。 ……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 3005浏览 0评论1616个赞
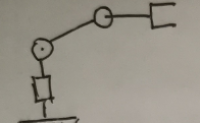
本文我们分别用SDH法和MDH来给同一个机器人模型建模,感受一下两种建模方法在串联机械臂里面的应用。 所用平台:Matlab 本文重点是建系以及提取DH参数表的过程 想要运行程序只需要把所有代码复制粘贴进matlab运行即可 1. 机器人结构……继续阅读 » chuchu 5年前 (2021-04-26) 2423浏览 0评论705个赞
本篇将会三维空间中,对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 首先,我们来看三维空间中简图: ……继续阅读 » 我是。 5年前 (2021-04-26) 3350浏览 0评论2987个赞
从正面观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的滚转角调节 一、几何模型 ……继续阅读 » 我是。 5年前 (2021-04-26) 2042浏览 0评论348个赞
在建立好自己的机器人模型后, 我们可以利用turtlebot的ROS库,实现自己机器人的自主导航. ……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1581浏览 0评论2453个赞
对于串联机器人来说,求逆解的难度要大于求正解,市面上的工业机器人一般是利用的是利用解析法求封闭解,机器人有封闭解是有条件的—Pieper法则。另一种求逆解的方法是利用迭代法求数值解,适用于不满足Pieper法则的构型,……继续阅读 » gpeng832 5年前 (2021-04-26) 2392浏览 0评论737个赞
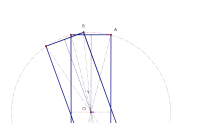
从正上方观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的偏航调节 一、几何模型 以右前腿为例 ……继续阅读 » 我是。 5年前 (2021-04-26) 3180浏览 0评论1228个赞
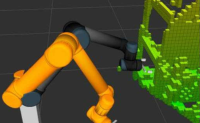
师兄和同门在做SLAM的时候,经常会用到的 octomap ,也就是八叉树地图。octomap相比于点云地图来说大大减小了地图的存储空间。既然octomap可以用于导航和避障,那么自然也可以导入moveit!,作为机械臂路径规划过程中的障碍物,方便机械臂和障碍物之间进行碰撞检测。……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3664浏览 0评论2312个赞
根据零力矩点理论分析机器人行进过程的稳定条件,利用稳定裕度的概念,在支撑多边形中求取最优稳定点来规划零力矩点.可以为避免 walk步态中频繁调整躯干姿态导致的能耗和行进速度损失[1] 此外,“零力矩点”是判定仿人机器人动态稳定运动的……继续阅读 » 我是。 5年前 (2021-04-26) 2167浏览 0评论622个赞
源码: ……继续阅读 » bbtang5568 5年前 (2021-04-26) 1878浏览 0评论2100个赞
此教程以webots_demo为基础……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2470浏览 0评论952个赞







![ROS URDF(一):自定义robot model —–解决WARN:Fixed Frame [base_link] does not exist](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20181114012713868.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2JidGFuZzU1Njg=,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)






![webots版本升级 webots 2021a 注意点[补写]](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210228_42739.png&h=123&w=200&q=90&zc=1&ct=1)