系统辨识专题(一)——MATLAB系统辨识工具箱的使用案例 在建立多旋翼无人机系统模型的基础上,我们能够更有针对性地设计对应的控制器,为无人机系统故障诊断提供判据。本文将结合系统Matlab自带的系统辨识工具箱阐述一个简单的过程模型的完整辨识过程。 在使用系统辨……继续阅读 » 5年前 (2021-04-26) 3231浏览 0评论1435个赞
前言 本专题将从新手的角度,逐步揭开无人机导航系统的神秘面纱。 传感器作为无人机的重要组成部分,承担了无人机系统对于环境信息以及自身状态采集的重担。大部分的导航算法都离不开对传感器原理的深入了解。 例如,针对不同的传感器……继续阅读 » 5年前 (2021-04-26) 2679浏览 0评论284个赞
前言 上一篇中,我们初步了解了多旋翼无人机最常用,也是最核心的几种传感器——IMU、气压计、磁力计、GPS。基于以上几种传感器,我们能够搭建一套完整的组合导航系统,从而对无人机的姿态、速度、位置等信息进行最优估计。 &n……继续阅读 » 5年前 (2021-04-26) 2095浏览 0评论2222个赞
前言 状态估计与控制是机器人学中两个避不开的问题,对于无人机而言亦是如此。如何在理解无人机模型的基础上,利用传感器信息,尽可能准确地估计一组完整描述它随时间运动的物理量,如位置、速度、加速度、角度、角速度等……继续阅读 » 5年前 (2021-04-26) 2227浏览 0评论1147个赞
前言 上一篇中详细阐述了概率论的几个基本定理——概率密度函数、贝叶斯公式及推断、矩以及归一化积。 本篇将在上一篇的基础上,围绕高斯随机过程展开,详细讨论高斯概率密度函数的……继续阅读 » 5年前 (2021-04-26) 1555浏览 0评论2805个赞
前言 导航系统作为无人机的感知单元,承担着无人机状态参量测量与估计的重任。对于多旋翼无人机而言,其姿态、加速度、速度、位置以及各传感器的零偏与补偿系数均需要被测量或估计。这些众多参量之中只有极少一部分能够被直接或间接测量,大多数参数需要我们采用多个传感……继续阅读 » 5年前 (2021-04-26) 1798浏览 0评论2550个赞
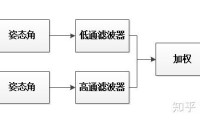
前言 上一篇中详细阐述了多旋翼飞行器导航系统中使用的主要传感器及其特性,本篇将着重介绍导航系统设计中常用的两种算法——互补滤波算法与卡尔曼滤波算法。同时,阐述一种多旋翼飞行器导航系统的设计方案。 互补滤波算法简介 互补滤波器的主……继续阅读 » 5年前 (2021-04-26) 2188浏览 0评论2219个赞
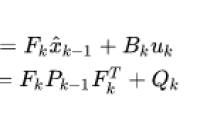
前言 扩展卡尔曼滤波(EKF)是多旋翼飞行器导航系统设计中,最常用的最优估计算法之一。其原理是在卡尔曼滤波的基础上,对非线性模型进行线性化,再进行最优估计,因此,其核心算法原理与卡尔曼滤波算法相似。本篇将围绕卡尔曼滤波展开 ,阐述其核……继续阅读 » 5年前 (2021-04-26) 3544浏览 0评论1421个赞
前言 上一篇中围绕一个简单的匀速直线运动的状态估计仿真实例展开,阐述了卡尔曼滤波器的实现方式、过程以及仿真效果。本篇将对卡尔曼滤波的几个主要参数的选取作一定的说明,同时,围绕扩展卡尔曼滤波算法展开,阐述其与卡尔曼滤波器的区别与作用。 ……继续阅读 » 5年前 (2021-04-26) 2637浏览 0评论2248个赞
一. 前言 PID控制算法是工业控制领域数十年来应用最广泛的经典控制算法之一,其理论原理易于理解,算法结构简单,易于工程实现,这也是其受到工程师们青睐的重要原因。 尽管算法原理简单,其参数整定难度却因被控对象而异,不同工程师对同……继续阅读 » 5年前 (2021-04-26) 3411浏览 0评论608个赞
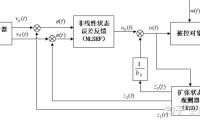
一. 前言 上篇中详细阐述了几种经典的PID控制算法及其存在的问题以及改进思路了,本篇将围绕韩京清教授开创的自抗扰控制算法进行阐述,该算法为工业控制领域带来了一项可操性极强的自动控制技术。 二. ADRC……继续阅读 » 5年前 (2021-04-26) 2076浏览 0评论1656个赞
一. 前言 上篇中详细阐述了经典的自抗扰控制算法的原理,本篇将围绕两种ADRC算法展开,针对扩张状态观测器的参数整定问题进行详解,同时,对跟踪微分器的几个重要应用进行介绍。 二. 两种……继续阅读 » 5年前 (2021-04-26) 2035浏览 0评论450个赞
一. 前言 上一篇中详细阐述了MATLAB系统辨识工具箱的使用实例,本篇将以多旋翼飞行器为研究对象,详细阐述其刚体动力学模型、飞行控制刚体模型以及控制效率模型。最后,针对多旋翼飞行器控制系统设计当中的主要系统辨识问题进行解析。 ……继续阅读 » 5年前 (2021-04-26) 3101浏览 0评论2062个赞
一. 前言 上一篇文章中,我们对多旋翼飞行器进行了详细的建模,对其刚体动力学模型、刚体运动学模型以及控制效率模型进行了详细的介绍,了解建模对于多旋翼飞行器控制系统设计的重要性,建模以及系统辨识技术在多旋翼飞行器设计中起到的作用。 &nbs……继续阅读 » 5年前 (2021-04-26) 1731浏览 0评论1377个赞
前言 前一篇中对自抗扰控制算法的原理及扩张状态观测器的参数整定问题进行了详解。同时,提出了一种基于自抗扰控制算法的多旋翼飞行器控制系统设计方案。 在系统辨识专题中,我们提到了控制效率方程的作用及重要性。 <……继续阅读 » 5年前 (2021-04-26) 3311浏览 0评论1770个赞
A*算法作为路径规划算法中应用最广泛实用的算法,由于A*算法的算法原理较为简单,网络上能够找到各种各样的学习资料,本文仅对其实现过程进行总结,同时,附上matlab仿真源码及结果图供参考学习。 算法实现过程 A*算法作为一种启发式的……继续阅读 » 5年前 (2021-04-26) 2013浏览 0评论1639个赞
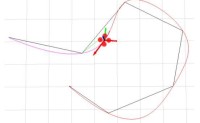
前言 上一章介绍了一种高效、实时的运动规划算法——JerkLimitedTrajectory(JLT)。 在给定起始状态与终止状态后,该算法能够快速地计算出一条符合三阶积分器动力学模型的运动轨迹。其适用于类似多旋翼无人机的对象,能够解……继续阅读 » 5年前 (2021-04-26) 2618浏览 0评论905个赞
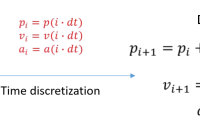
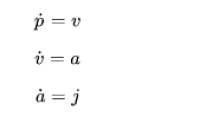
前言 上一篇中简述了模型预测控制在多旋翼飞行器运动规划中的应用。 本篇将针对采用线性MPC的多旋翼飞行器的运动规划方案进行详细推导。 系统模型的离散化 对于多旋翼飞行器这类三阶积分器模型……继续阅读 » 5年前 (2021-04-26) 3041浏览 0评论939个赞
前言 上一篇详细介绍了模型预测控制的算法原理,以及其在多旋翼无人……继续阅读 » 5年前 (2021-04-26) 1915浏览 0评论2938个赞
前言 上篇中介绍了基于稀疏点云传感器的常用避障规划算法,由于实际工程中受限于不同产品的技术成熟度、成本的因素的原因,不得不采用低成本的单点测距传感器进行避障。然而,避障作为无人机自动飞行必不可少的功能,设计一个健壮的避障规划器显得尤为……继续阅读 » 5年前 (2021-04-26) 3637浏览 0评论1586个赞
前言 在环境感知与规划专题(一)——A*算法入门一……继续阅读 » 5年前 (2021-04-26) 3179浏览 0评论2019个赞
前言 ……继续阅读 » 5年前 (2021-04-26) 2174浏览 0评论511个赞
前言 ……继续阅读 » 5年前 (2021-04-26) 2142浏览 0评论2475个赞