前言
本专题将从新手的角度,逐步揭开无人机导航系统的神秘面纱。 传感器作为无人机的重要组成部分,承担了无人机系统对于环境信息以及自身状态采集的重担。大部分的导航算法都离不开对传感器原理的深入了解。 例如,针对不同的传感器应该选择使用何种数字滤波器?状态估计算法的观测方程与运动方程如何设计?估计算法的噪声如何选择等等。诸如此类问题的解决,都需要对所采用的传感器本身,或者说对传感器模型有着深入的了解。 本篇将针对多旋翼无人机的核心传感器特性进行阐述,同时,针对这些传感器在工程应用中可能碰到的问题进行详解。
惯性测量单元(IMU)
近年来,惯性测量单元(IMU)的普及,是多旋翼无人机崛起的其中一个重要原因。其成本低,体积小的优点同样使其在手机领域被广泛使用。 IMU主要由陀螺仪(Gyroscope)与加速度计(Accelerometer)组成,其用于测量无人机载体的旋转角速度与线性加速度。
- 陀螺仪(Gyroscope)
陀螺仪原理是:
- 对陀螺仪内部的质量块(很小)两端施加电压,并使其进行变化,让质量块做一定频率的振动。
- 当载体进行旋转时,会产生 科氏加速度 ,通过硬件电路,对科氏加速度进行放大、测量,即可得到载体运动的角速率。
- 科氏加速度 =
为载体的角速率,
为质量块的质量
——在转动参考系中,由于物体做牵连运动产生的沿旋转半径做相对运动,由牵连运动和相对运动耦合而成的加速度即为科里奥利加速度又称科氏加速度。 陀螺仪是姿态估计的核心传感器,然而,它存在温漂、随机漂移等误差存在。消费级以及低成本的工业级陀螺仪无法满足长时间的纯积分式姿态估计,因此,往往需要搭配其他传感器使用,如加速度计、GPS、磁力计等等。
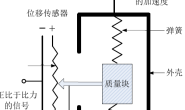
- 加速度计(Accelerometer)
加速度计是一种能够测量载体加速度的传感器(包括重力加速度),它通常由质量块、阻尼器、弹性元件、敏感元件以及适调电路组成。 与陀螺仪相似的是,加速度计同样能够用于载体的姿态估计。由于加速度计不仅测量重力加速度,载体的线加速度同样会反映在加速度计的测量值中。因此,我们需要从加速度计测量值中去除线性加速度的部分,才能够准确地利用重力加速度估计载体的姿态角。 显而易见的,导航系统仅有加速度计与陀螺仪,是无法满足载体在所有运动状态下的姿态估计的。当载体处于机动状态(加速度较大时),线性加速度在加速度计测量值中所占的比重增大,尽管短时间依靠陀螺仪积分估计的姿态,能够保持一定的精度,然而,运动持续时间较久后,姿态估计值会受到线性加速度的影响而出现偏移。 更糟糕的是,对于部分导航系统,加速度计的测量值同样参与陀螺仪零偏的估计,若线性加速度长时间持续较大,则陀螺仪零偏也将会被其带偏。 IMU作为载体姿态估计的重要器件,在整个导航系统中占有举足轻重的地位。然而,其对于环境温度较为敏感,且对于载体的振动环境有较高的要求,在此,分享几个实际的工程案例: 1. 案例1
- 场景还原
选用ADI某型号IMU,经过大量飞行测试,发现使用该IMU测量数据进行姿态估计,在载体进行某些运动情况下出现姿态误差过大的情况。
- 案例分析
学过信号与系统的同学一定对 香农采样定理(又称奈奎斯特采样定理) 非常熟悉。香农采样定理指出,若需要对模拟信号进行采样,并通过数字信号的形式进行完整的重建,那么必须满足采样频率大于两倍模拟信号的最高频率。 那么当采样频率不满足香农采样定理时,会出现什么现象呢? 经过大量的传感器数据采集FFT频谱分析,我们发现加速度测中出现了许多本不属于载体振动频率范围内的信号,产生这些异常频率的现象在信息论中被称为混叠现象。 于是,基于这一点推论,我们重新翻阅了这款传感器的Datasheet,由于大部分的消费级IMU数字带宽都会比较大,通常可配置到1000HZ以上,然而这款工业级IMU则略有不同。它的带宽在其模拟转数字电路部分就被固定了,无法通过软件进行配置,由此,导致采样频率无法满足香农采样定理,这才产生了混叠现象。 这个案例告诉我们,在我们选择IMU的过程中,不光要关注器件本身的各项指标。更重要的是,你需要对载体的工作环境有一个非常清晰的认知。比如,你需要知道载体在正常工作时的振动频率范围,在异常状态下可能产生的机械共振频率范围等等。在条件允许的情况下,最好能够对载体进行扫频实验,把各种工况下的载体振动频谱进行分析,从而得到一个准确的数据集供工程师参考。 在拥有这些认知的前提下,才有可能选择最合适的IMU,而不是花大价钱买了一个无法在载体上正常工作的IMU。 2. 案例2 关于多旋翼无人机到底是否需要物理减振机构这个问题,似乎绝大多数人的共识是需要。 实际上,这是一个非常大的误区。在回答这个问题之前,我们首先需要搞清楚一件事——物理减振机构到底起到的是什么作用,它的原理是什么? 目前大部分多旋翼无人机的减震机构,多用海绵之类的具有一定弹性的介质组成,它的原理类似于弹簧,我们可以认为IMU在一个小弹簧上进行工作,利用弹簧的阻尼特性吸收动能转换为势能储存起来,以此达到削弱振动幅值、改变振动频率的目的。 听起来,物理减震机构是一个非常理想的隔振器件。然而,事实上,实际工程情况却远没有那么理想。首先,我们的载体振动工况往往存在多个振动波峰。加速度、角速度的频率多集中在20HZ以内,因此,理论上,无论我们采用数字滤波器或者物理减振的手段,我们都只需要将20HZ以上频率的振动滤除即可。 然而,一种材质的减振机构往往只能针对较窄频段的振动有较好的减振效果,而不像数字滤波器,能够精确设计并且高效地通过FFT频谱分析来验证其减振(滤波)性能。 就更难选择。一般来说,材质越软的材料,减震频率越低,但也由于较软,会对有效信号也产生影响,且该影响往往很难量化,所以,在没有得到完整的振动数据的情况下,滥用物理减振机构,可能会带来意想不到的负面影响,慎用! 而数字滤波器则不同,只要我们了解载体的振动工况,一定能够设计出一个适合该工况环境下的滤波器,提取出加速度与角速度的有效信号。 说了那么多数字滤波器的好处,那么物理减振机构是不是真的一无是处呢? 答案显然是否定的。什么时候需要物理减振机构?载体振动幅值过大,且振动频率比较接近有效信号频率时。 这时候,往往不能找到合适的数字滤波器,能够将振动完全滤除,此时,设计合适的物理减振机构就是非常重要的了。 原则上,对于一款产品来说,如果能够用数字滤波器解决问题的,坚决不用物理减振机构,毕竟机械结构是有老化周期的,但软件滤波器则没有。
气压计
IMU主要用于载体的姿态估计以及速度、位置估计,气压计则是主要的高度传感器,其测量值为海拔。 因此,在使用时,我们需要针对起飞平面进行对齐,它往往表征的是一个相对高度。 气压计通过大气压强以及环境温度等参数,对载体所处的海拔进行估算,由此易知,气压计对于温度与环境变化是十分敏感的。同一位置,不同时间的测量值很有可能不同,在使用时需要进行一些工程上的处理。
- 对气压计所处环境进行适当的密封处理
图中绿色曲线为气压计的高度测量值,红色为导航系统的高度估计值,蓝色为控制系统的高度期望值。 此时,无人机正在进行高速飞行切换至悬停状态过程中,载体具有较大的加速度,气压计附近的压强波动较大,因此,其高度测量值也产生极大的波动。 若不对气压计进行适当的密封处理,显而易见的,导航系统估计的高度值将会受到较大影响。 ——初识传感器(一)")
- 对气压计添加温控
从气压计的测量原理中可知,其对于温度十分敏感,直接让气压计暴露在工作环境中,则其测量值将会随着温度而改变(下图中红色曲线为气压计高度测量值,实验环境为静置无温控),这不是我们想得到的结果。 ——初识传感器(一)") 对气压计施加温控可以很好地控制其工作温度,减少了一定的测量不确定性,增加传感器数据的稳定性(如下图所示,增加温控之后,气压计的高度测量数据稳定性有较大提升)。
对气压计施加温控可以很好地控制其工作温度,减少了一定的测量不确定性,增加传感器数据的稳定性(如下图所示,增加温控之后,气压计的高度测量数据稳定性有较大提升)。 ——初识传感器(一)") 除气压计之外,还有一些相对距离传感器,如TOF、超声波、激光、毫米波、双目视觉等等,由于较为复杂,本篇不再赘述,后续针对这些传感器单独详解。
除气压计之外,还有一些相对距离传感器,如TOF、超声波、激光、毫米波、双目视觉等等,由于较为复杂,本篇不再赘述,后续针对这些传感器单独详解。
磁力计
磁力计是重要的姿态估计传感器之一,其测量信息中包含航向角估计所需的信息(仅凭加速度与角速度是无法得到长期稳定的航向角的),尽管它不是唯一能够单独解算长期稳定航向角信息的传感器,却是最常用的传感器。 磁力计与加速度计有着异曲同工之妙。加速度计通过测量重力加速度(需要从测量值中去除线性加速度),对载体姿态进行估计;磁力计则通过测量地磁场矢量,对姿态进行估计。 与加速度计不同的是,由于地磁场十分微弱,环境磁场的轻微变化都有可能对其产生较大影响。因此,磁力计的安装位置需要尽可能远离载体上的强磁干扰(如电源线、强磁负载等等)。 此外,在载体磁场环境发生较大变化后,均需要对磁力计参数进行校准,而加速度计则只要传感器未发生位移,一般情况下不需要重复校准。 磁力计是一个极为敏感的器件,在无人机的整个导航系统中,属于“高危”器件,因此,针对其故障保护需要设计较多的算法逻辑去保证导航系统的鲁棒性。
全球定位系统(GPS)
GPS是无人机速度、位置测量传感器,它能够提供无人机的经纬度坐标信息。因此,无人机的大部分作业都离不开GPS。正因为如此,GPS的稳定性显得尤为重要,对于没有视觉导航系统的无人机而言,GPS故障意味着只能实现手动飞行,而无法继续执行自动任务,错误的GPS数据甚至可能导致坠机。 在设计导航系统时,GPS失效处理逻辑必须重点考虑,当无人机工作在城区时,高楼等建筑会使GPS信号产生多径效应,即使GPS模块反馈的精度因子较好,其测量值也未必可信。此时,我们需要有其他手段来判断GPS信号的置信度。当置信度较低时,需要启用故障处理备案。 此外,由于GPS的信号可能会受到其他相邻频段无线信号的干扰,因此,直接失效的可能性也是存在的,除了常规的故障诊断以及处理措施外,还应该设计相应的导航系统重组及恢复机制。
总结
本篇介绍了多旋翼无人机最核心、常用的几种传感器。下一篇中将针对其他实用但不是必备的几种传感器进行详解——相对距离/深度传感器(TOF、超声波雷达、毫米波雷达、激光雷达、激光、视觉传感器)。
作者简介: 一个被Coding耽误的无人机算法工程师,控制、导航略懂一二,热衷技术,喜欢乒乓、音乐、电影,欢迎交流。 知乎: @遥远的乌托邦 GitHub: https://github.com/DistantUtopia 微信公众号: @遥远的乌托邦