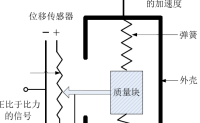
1、三轴加速度计 ……继续阅读 » autotian 5年前 (2021-04-26) 3373浏览 0评论2880个赞
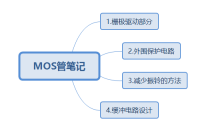
全文框架……继续阅读 » WillChan_ 5年前 (2021-04-26) 1909浏览 0评论118个赞
目录树莓派控制无人机实现定点降落(六)——地标识别及控制算法的实现1、地标识别2、控制算法……继续阅读 » CyrilSterling 5年前 (2021-04-26) 3179浏览 0评论828个赞
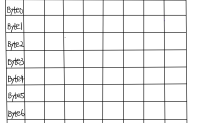
本文目录 1.背景2.所需要的软件与硬件3.Motorola编码和Intel编码……继续阅读 » ScottieHan 5年前 (2021-04-26) 2556浏览 0评论1322个赞
前言 本专题将从新手的角度,逐步揭开无人机导航系统的神秘面纱。 传感器作为无人机的重要组成部分,承担了无人机系统对于环境信息以及自身状态采集的重担。大部分的导航算法都离不开对传感器原理的深入了解。 例如,针对不同的传感器……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1951浏览 0评论2926个赞
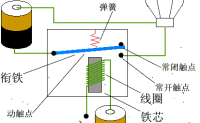
最近老师定做了一个气动手抓,手抓的原理简单,主要是通过气泵充气后,通过24v电压控制,进而以通电和放电的方式来使手抓闭合和张开,此时可以用一个继电器来自动控制手抓电源。 首先分析一下继电器大致原理:如图所示,可以简化理解成通过给线圈通电后,然后产生电磁效应,使衔铁向……继续阅读 » 光头明明 5年前 (2021-04-26) 3263浏览 0评论1632个赞
每个PRU都连接着一个OCP主口,它允许访问linux主机设备对应的内存地址。此功能允许PRU控制通用GPIO的输入和输出状态。PRU可访问Linux主机内存,但是访问速度要慢上好几倍,因为内存访问需要路由到外部的PRU-ICSS,在通过PRU-ICSS接口从/OCP从口接收返回……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3386浏览 0评论1744个赞
魔方机器人(基于OpenCV、Arduino) 简介 顾名思义,魔……继续阅读 » Yang1024skr 5年前 (2021-04-26) 2283浏览 0评论812个赞