前言
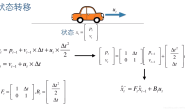
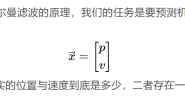
状态估计与控制是机器人学中两个避不开的问题,对于无人机而言亦是如此。如何在理解无人机模型的基础上,利用传感器信息,尽可能准确地估计一组完整描述它随时间运动的物理量,如位置、速度、加速度、角度、角速度等等,是状态估计领域要解决的最主要问题。 稳定、准确的状态估计是无人机稳定控制的基础。本篇将讨论状态估计与概率论之间的联系。
状态估计问题的定义
状态估计的过程是理解传感器本质的过程。任何传感器的精度都是有限的,因此,每个传感器的测量值也存在不确定性。 传感器可分为两大类:内感受型和外感受型。 总结来说,状态估计问题是根据系统的先验模型和测量序列,对系统内在状态进行重构的问题。 如何以最好的方式利用已有传感器是状态估计要解决的问题。
概率密度函数
定义为区间
上的随机变量,它服从某个概率密度函数
,那么这个非负函数满足:
当我们需要计算
在区间
上的概率
,则只需要对概率密度函数进行该区间上的积分运算:
条件概率
假设条件概率密度函数表示自变量
在条件
下的概率密度函数,那么对于所有的
,
条件概率可以这样理解:变量
表示某一待估计的状态,变量
表示传感器对于该状态的测量值。 那么在传感器测量值取值一定的情况下(
),变量
在区间
中取值的概率密度。
联合概率密度函数
设自变量,对于每一个
,满足
。那么其联合概率满足全概率公理:
联合概率密度函数通常可用以下写法表示:
贝叶斯公式及推断
我们可以把一个联合概率密度函数分解为一个条件概率密度和一个非条件概率密度的乘积: 由此可得贝叶斯公式:
其中
为后验概率密度函数,
为传感器模型,
为先验概率密度函数。 先验概率密度函数可以认为是根据以前经验对于某状态进行估计得到的概率,即先验模型,这里以概率密度函数的形式表示。 传感器模型可以用条件概率密度函数的概念来理解。对于任一确定状态
,传感器测量值
可能取值的概率密度函数。 后验概率密度函数也可以根据条件概率密度函数的概念来理解。对于任一确定传感器测量值
,状态量
的所有可能取值的概率密度函数。 通常来说,后验概率即为状态估计中每一算法周期输出的状态量的概率。 根据贝叶斯公式,后验概率密度函数可表示为:
对其分母展开,这里有一个小技巧,根据条件概率的积分为1的性质,我们可以将1代换为后验概率密度函数的积分:
由于
中不包含自变量
,我们可以将其当做常数处理,将其移入积分号内,由此可得,
这里,再次使用联合概率密度函数分解公式,可得:
将其代入,可得后验概率密度函数为:
矩
对于概率密度而言,我们通常研究其零阶矩(全事件概率)、一阶矩(期望)以及二阶矩(协方差
),其中一阶矩与二阶矩的表达式如下:
——状态估计与概率论(一)")
统计独立性和不相关性
当两个随机变量和
的联合概率密度函数可以用以下的因式分解,那么我们称为这两个随机变量是统计独立的:
如果两个随机变量的期望满足下式,我们称它们是不相关的:
统计独立的两个随机变量一定满足不相关性,反之,则不一定成立。
归一化积
归一化积可以理解为对于同一个随机变量的两个不同的概率密度函数。 在实际工程问题中,我们可以认为同时存在两个传感器测量同一个状态量,其概率密度函数不同,但我们需要归一化为一个概率密度函数,这时候就需要使用到归一化积。 其中,
表示的是归一化因子,下面我们来推导一下归一化因子
的表达式。 设
为待估计的状态变量,
为针对该状态量的两次独立测量值,那么:
这里需要再次用到贝叶斯公式,将
看成一个变量
,那么:
假设
是统计独立的,那么:
现在我们将传感器模型
代入上式,即可得到归一化因子
:
那么对于待估计状态变量
的两次统计独立的测量
,我们可以通过归一化积的公式计算其后验估计:
总结
本篇主要针对状态估计问题的定义展开,围绕概率论的几种非常重要的概念及其公式推导进行详解,下一篇中将针对高斯随机过程及其性质进行详细讨论与推导。 作者简介: 一个被Coding耽误的无人机算法工程师,控制、导航略懂一二,热衷技术,喜欢乒乓、音乐、电影,欢迎交流。 知乎: @遥远的乌托邦 GitHub: https://github.com/DistantUtopia