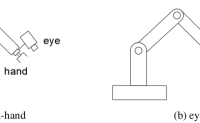
在我们进行机械臂抓取实验时候,总是少不了相机的标定环节。我认为相机标定可以分为两个部分。 一个部分是相机外参的标定,也就是获得相机坐标系与世界坐标系的关系,在我们的系统中,世界坐标系是可以自定义的。其中眼在手上的标定,不变的是相机与机械臂末端的坐标转换。通过手眼标定获得这两者的转……继续阅读 » 5年前 (2021-04-26) 2552浏览 0评论1532个赞
由于疫情原因不能进入实验室,遂学习在仿真环境gazebo下利用UR5机械臂搭建模拟平台,此模拟平台可以用于UR5机械臂通用视觉抓取平台。以下是个人总结一些观点,仅供参考。 1. 环境搭建 世界环……继续阅读 » 5年前 (2021-04-26) 1932浏览 0评论2493个赞
6,视觉算法 这里我以OpenCv中的SIFT描述子检测目标物体相对于相机的位姿。这里有个开源的包。find_object_2d是ROS平台下一个功能强大的识别物体的功能包。由于对于纯颜色物体具有很少的特征,所以我决定把另外两个物快……继续阅读 » 5年前 (2021-04-26) 3177浏览 0评论1706个赞
结论: 相比于老的ur5_bringup.launch来控制机械臂可以更加柔顺的控制UR5机械臂。但是也存在规划时出现失败的情况,需要多次plan。具体怎么柔顺我会具体说明一下: 那末怎么使用呢? ……继续阅读 » 5年前 (2021-04-26) 2765浏览 0评论2097个赞
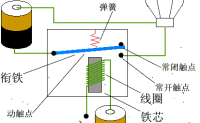
最近老师定做了一个气动手抓,手抓的原理简单,主要是通过气泵充气后,通过24v电压控制,进而以通电和放电的方式来使手抓闭合和张开,此时可以用一个继电器来自动控制手抓电源。 首先分析一下继电器大致原理:如图所示,可以简化理解成通过给线圈通电后,然后产生电磁效应,使衔铁向……继续阅读 » 5年前 (2021-04-26) 2942浏览 0评论2384个赞
一,配置环境 硬件: UR5工业机器人 Kinect V2 软件: 注意我是将下面包安装在ros下工作目……继续阅读 » 5年前 (2021-04-26) 2765浏览 0评论2860个赞
1,ROS 根据W. S. Newsman 在“A Systematic Approach to Learning Robot Programming With ROS”中提到。 ROS (robot……继续阅读 » 5年前 (2021-04-26) 3430浏览 0评论1604个赞
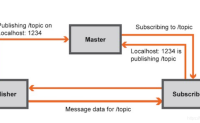
通过rostopic list 可以查看发布的话题,可以看到有/tag_detections和/tf话题,那麽我们先编写订阅/tag_detections,然后根据此模板订阅成/tf ……继续阅读 » 5年前 (2021-04-26) 1575浏览 0评论499个赞
fake_ar_publisher::ARMarkerConstPtr last_msg_;void visionCallback(const fake_ar_publisher……继续阅读 » 5年前 (2021-04-26) 2666浏览 0评论1824个赞
进入课题组的初期,老师分配了一个实际项目,下面写一下搭的项目的大致框架及其心得感悟,因为现在已经越发浮躁,想踏下心来好好做一些回顾一下自己的新手上路。需要准备材料:apriltags下tag标签,usb摄像头,标定板,ur5(也可以用gazebo模型代替) 大致流程……继续阅读 » 5年前 (2021-04-26) 1823浏览 0评论1144个赞
主要参考网址:https://blog.csdn.net/harrycomeon/article/details/90451692 <……继续阅读 » 5年前 (2021-04-26) 2782浏览 0评论663个赞
参考网址:https://industrial-training-……继续阅读 » 5年前 (2021-04-26) 1845浏览 0评论1737个赞
这一块自己参照以下网址配置 https://i……继续阅读 » 5年前 (2021-04-26) 3515浏览 0评论2699个赞
××××××××××××××××××××××××××××××××××××× 8.15号更新 新的github链接:https://github.com/harrycomeon/Project1-Apriltags-UR5 由于直接采用myrobot的效果并不好,所以……继续阅读 » 5年前 (2021-04-26) 2571浏览 0评论2769个赞
首先说明一下,这里我们的摄像头和tag只是利用了他们的相对位姿,并没有按照实际模型那样布置摄像头和tag,但这并不影响我们观察整个系统的运行效果,布置如下: ……继续阅读 » 5年前 (2021-04-26) 2803浏览 0评论2537个赞
硬件环境:搭载ubuntu 16.04的笔记本,aubo_i5机械臂 软件环境:ros操作系统,aubo_i5驱动包 1,安装ros操作系统 下面链接前半部分为安装教程: https://blog.csd……继续阅读 » 5年前 (2021-04-26) 2829浏览 0评论2201个赞
错位情况:  3376浏览 0评论2089个赞
首先感谢实验课的助教工作,然我看到了学生们的热情以及大家的智慧。这是我在其中绘图机器人实验的基础上进行复现完成的一次demo演示。 ……继续阅读 » 5年前 (2021-04-26) 2359浏览 0评论2060个赞