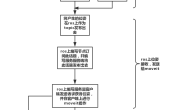
××××××××××××××××××××××××××××××××××××× 8.15号更新 新的github链接:https://github.com/harrycomeon/Project1-Apriltags-UR5 由于直接采用myrobot的效果并不好,所以选择在universal_robot文件下对ur_description的urdf文件下的ur5.urdf.xacro进行修改,修改如下,添加了标定后的相机的姿态以及添加了几个墙面作为障碍物,从而约束规划路径。代码如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro" name="ur5">
<!--robot xmlns:xacro="http://ros.org/wiki/xacro"name="ur5"-->
<xacro:include filename="$(find ur_description)/urdf/ur.transmission.xacro" />
<xacro:include filename="$(find ur_description)/urdf/ur.gazebo.xacro" />
<xacro:macro name="cylinder_inertial" params="radius length mass *origin">
<inertial>
<mass value="${mass}" />
<xacro:insert_block name="origin" />
<inertia ixx="${0.0833333 * mass * (3 * radius * radius + length * length)}" ixy="0.0" ixz="0.0"
iyy="${0.0833333 * mass * (3 * radius * radius + length * length)}" iyz="0.0"
izz="${0.5 * mass * radius * radius}" />
</inertial>
</xacro:macro>
<xacro:macro name="ur5_robot" params="prefix joint_limited
shoulder_pan_lower_limit:=${-pi} shoulder_pan_upper_limit:=${pi}
shoulder_lift_lower_limit:=${-pi} shoulder_lift_upper_limit:=${pi}
elbow_joint_lower_limit:=${-pi} elbow_joint_upper_limit:=${pi}
wrist_1_lower_limit:=${-pi} wrist_1_upper_limit:=${pi}
wrist_2_lower_limit:=${-pi} wrist_2_upper_limit:=${pi}
wrist_3_lower_limit:=${-pi} wrist_3_upper_limit:=${pi}
transmission_hw_interface:=hardware_interface/PositionJointInterface">
<!-- Inertia parameters -->
<xacro:property name="base_mass" value="4.0" /> <!-- This mass might be incorrect -->
<xacro:property name="shoulder_mass" value="3.7000" />
<xacro:property name="upper_arm_mass" value="8.3930" />
<xacro:property name="forearm_mass" value="2.2750" />
<xacro:property name="wrist_1_mass" value="1.2190" />
<xacro:property name="wrist_2_mass" value="1.2190" />
<xacro:property name="wrist_3_mass" value="0.1879" />
<xacro:property name="shoulder_cog" value="0.0 0.00193 -0.02561" />
<xacro:property name="upper_arm_cog" value="0.0 -0.024201 0.2125" />
<xacro:property name="forearm_cog" value="0.0 0.0265 0.11993" />
<xacro:property name="wrist_1_cog" value="0.0 0.110949 0.01634" />
<xacro:property name="wrist_2_cog" value="0.0 0.0018 0.11099" />
<xacro:property name="wrist_3_cog" value="0.0 0.001159 0.0" />
<!-- Kinematic model -->
<!-- Properties from urcontrol.conf -->
<!--
DH for UR5:
a = [0.00000, -0.42500, -0.39225, 0.00000, 0.00000, 0.0000]
d = [0.089159, 0.00000, 0.00000, 0.10915, 0.09465, 0.0823]
alpha = [ 1.570796327, 0, 0, 1.570796327, -1.570796327, 0 ]
q_home_offset = [0, -1.570796327, 0, -1.570796327, 0, 0]
joint_direction = [-1, -1, 1, 1, 1, 1]
mass = [3.7000, 8.3930, 2.2750, 1.2190, 1.2190, 0.1879]
center_of_mass = [ [0, -0.02561, 0.00193], [0.2125, 0, 0.11336], [0.11993, 0.0, 0.0265], [0, -0.0018, 0.01634], [0, 0.0018,0.01634], [0, 0, -0.001159] ]
-->
<xacro:property name="d1" value="0.089159" />
<xacro:property name="a2" value="-0.42500" />
<xacro:property name="a3" value="-0.39225" />
<xacro:property name="d4" value="0.10915" />
<xacro:property name="d5" value="0.09465" />
<xacro:property name="d6" value="0.0823" />
<!-- Arbitrary offsets for shoulder/elbow joints -->
<xacro:property name="shoulder_offset" value="0.13585" /> <!-- measured from model -->
<xacro:property name="elbow_offset" value="-0.1197" /> <!-- measured from model -->
<!-- link lengths used in model -->
<xacro:property name="shoulder_height" value="${d1}" />
<xacro:property name="upper_arm_length" value="${-a2}" />
<xacro:property name="forearm_length" value="${-a3}" />
<xacro:property name="wrist_1_length" value="${d4 - elbow_offset - shoulder_offset}" />
<xacro:property name="wrist_2_length" value="${d5}" />
<xacro:property name="wrist_3_length" value="${d6}" />
<!--property name="shoulder_height" value="0.089159" /-->
<!--property name="shoulder_offset" value="0.13585" /--> <!-- shoulder_offset - elbow_offset + wrist_1_length = 0.10915 -->
<!--property name="upper_arm_length" value="0.42500" /-->
<!--property name="elbow_offset" value="0.1197" /--> <!-- CAD measured -->
<!--property name="forearm_length" value="0.39225" /-->
<!--property name="wrist_1_length" value="0.093" /--> <!-- CAD measured -->
<!--property name="wrist_2_length" value="0.09465" /--> <!-- In CAD this distance is 0.930, but in the spec it is 0.09465 -->
<!--property name="wrist_3_length" value="0.0823" /-->
<xacro:property name="shoulder_radius" value="0.060" /> <!-- manually measured -->
<xacro:property name="upper_arm_radius" value="0.054" /> <!-- manually measured -->
<xacro:property name="elbow_radius" value="0.060" /> <!-- manually measured -->
<xacro:property name="forearm_radius" value="0.040" /> <!-- manually measured -->
<xacro:property name="wrist_radius" value="0.045" /> <!-- manually measured -->
<link name="${prefix}base_link" >
<visual>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/visual/base.dae" />
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/collision/base.stl" />
</geometry>
</collision>
<xacro:cylinder_inertial radius="0.06" length="0.05" mass="${base_mass}">
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
</xacro:cylinder_inertial>
</link>
<joint name="${prefix}shoulder_pan_joint" type="revolute">
<parent link="${prefix}base_link" />
<child link = "${prefix}shoulder_link" />
<origin xyz="0.0 0.0 ${shoulder_height}" rpy="0.0 0.0 0.0" />
<axis xyz="0 0 1" />
<xacro:unless value="${joint_limited}">
<limit lower="${-2.0 * pi}" upper="${2.0 * pi}" effort="150.0" velocity="3.15"/>
</xacro:unless>
<xacro:if value="${joint_limited}">
<limit lower="${shoulder_pan_lower_limit}" upper="${shoulder_pan_upper_limit}" effort="150.0" velocity="3.15"/>
</xacro:if>
<dynamics damping="0.0" friction="0.0"/>
</joint>
<link name="${prefix}shoulder_link">
<visual>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/visual/shoulder.dae" />
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/collision/shoulder.stl" />
</geometry>
</collision>
<xacro:cylinder_inertial radius="0.06" length="0.15" mass="${shoulder_mass}">
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
</xacro:cylinder_inertial>
</link>
<joint name="${prefix}shoulder_lift_joint" type="revolute">
<parent link="${prefix}shoulder_link" />
<child link = "${prefix}upper_arm_link" />
<origin xyz="0.0 ${shoulder_offset} 0.0" rpy="0.0 ${pi / 2.0} 0.0" />
<axis xyz="0 1 0" />
<xacro:unless value="${joint_limited}">
<limit lower="${-2.0 * pi}" upper="${2.0 * pi}" effort="150.0" velocity="3.15"/>
</xacro:unless>
<xacro:if value="${joint_limited}">
<limit lower="${shoulder_lift_lower_limit}" upper="${shoulder_lift_upper_limit}" effort="150.0" velocity="3.15"/>
</xacro:if>
<dynamics damping="0.0" friction="0.0"/>
</joint>
<link name="${prefix}upper_arm_link">
<visual>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/visual/upperarm.dae" />
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/collision/upperarm.stl" />
</geometry>
</collision>
<xacro:cylinder_inertial radius="0.06" length="0.56" mass="${upper_arm_mass}">
<origin xyz="0.0 0.0 0.28" rpy="0 0 0" />
</xacro:cylinder_inertial>
</link>
<joint name="${prefix}elbow_joint" type="revolute">
<parent link="${prefix}upper_arm_link" />
<child link = "${prefix}forearm_link" />
<origin xyz="0.0 ${elbow_offset} ${upper_arm_length}" rpy="0.0 0.0 0.0" />
<axis xyz="0 1 0" />
<xacro:unless value="${joint_limited}">
<limit lower="${-pi}" upper="${pi}" effort="150.0" velocity="3.15"/>
</xacro:unless>
<xacro:if value="${joint_limited}">
<limit lower="${elbow_joint_lower_limit}" upper="${elbow_joint_upper_limit}" effort="150.0" velocity="3.15"/>
</xacro:if>
<dynamics damping="0.0" friction="0.0"/>
</joint>
<link name="${prefix}forearm_link">
<visual>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/visual/forearm.dae" />
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/collision/forearm.stl" />
</geometry>
</collision>
<xacro:cylinder_inertial radius="0.06" length="0.5" mass="${forearm_mass}">
<origin xyz="0.0 0.0 0.25" rpy="0 0 0" />
</xacro:cylinder_inertial>
</link>
<joint name="${prefix}wrist_1_joint" type="revolute">
<parent link="${prefix}forearm_link" />
<child link = "${prefix}wrist_1_link" />
<origin xyz="0.0 0.0 ${forearm_length}" rpy="0.0 ${pi / 2.0} 0.0" />
<axis xyz="0 1 0" />
<xacro:unless value="${joint_limited}">
<limit lower="${-2.0 * pi}" upper="${2.0 * pi}" effort="28.0" velocity="3.2"/>
</xacro:unless>
<xacro:if value="${joint_limited}">
<limit lower="${wrist_1_lower_limit}" upper="${wrist_1_upper_limit}" effort="28.0" velocity="3.2"/>
</xacro:if>
<dynamics damping="0.0" friction="0.0"/>
</joint>
<link name="${prefix}wrist_1_link">
<visual>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/visual/wrist1.dae" />
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/collision/wrist1.stl" />
</geometry>
</collision>
<xacro:cylinder_inertial radius="0.6" length="0.12" mass="${wrist_1_mass}">
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
</xacro:cylinder_inertial>
</link>
<joint name="${prefix}wrist_2_joint" type="revolute">
<parent link="${prefix}wrist_1_link" />
<child link = "${prefix}wrist_2_link" />
<origin xyz="0.0 ${wrist_1_length} 0.0" rpy="0.0 0.0 0.0" />
<axis xyz="0 0 1" />
<xacro:unless value="${joint_limited}">
<limit lower="${-2.0 * pi}" upper="${2.0 * pi}" effort="28.0" velocity="3.2"/>
</xacro:unless>
<xacro:if value="${joint_limited}">
<limit lower="${wrist_2_lower_limit}" upper="${wrist_2_upper_limit}" effort="28.0" velocity="3.2"/>
</xacro:if>
<dynamics damping="0.0" friction="0.0"/>
</joint>
<link name="${prefix}wrist_2_link">
<visual>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/visual/wrist2.dae" />
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/collision/wrist2.stl" />
</geometry>
</collision>
<xacro:cylinder_inertial radius="0.6" length="0.12" mass="${wrist_2_mass}">
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
</xacro:cylinder_inertial>
</link>
<joint name="${prefix}wrist_3_joint" type="revolute">
<parent link="${prefix}wrist_2_link" />
<child link = "${prefix}wrist_3_link" />
<origin xyz="0.0 0.0 ${wrist_2_length}" rpy="0.0 0.0 0.0" />
<axis xyz="0 1 0" />
<xacro:unless value="${joint_limited}">
<limit lower="${-2.0 * pi}" upper="${2.0 * pi}" effort="28.0" velocity="3.2"/>
</xacro:unless>
<xacro:if value="${joint_limited}">
<limit lower="${wrist_3_lower_limit}" upper="${wrist_3_upper_limit}" effort="28.0" velocity="3.2"/>
</xacro:if>
<dynamics damping="0.0" friction="0.0"/>
</joint>
<link name="${prefix}wrist_3_link">
<visual>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/visual/wrist3.dae" />
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="package://ur_description/meshes/ur5/collision/wrist3.stl" />
</geometry>
</collision>
<xacro:cylinder_inertial radius="0.6" length="0.12" mass="${wrist_3_mass}">
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
</xacro:cylinder_inertial>
</link>
<joint name="${prefix}ee_fixed_joint" type="fixed">
<parent link="${prefix}wrist_3_link" />
<child link = "${prefix}ee_link" />
<origin xyz="0.0 ${wrist_3_length} 0.0" rpy="0.0 0.0 ${pi/2.0}" />
</joint>
<link name="${prefix}ee_link">
<collision>
<geometry>
<box size="0.01 0.01 0.01"/>
</geometry>
<origin rpy="0 0 0" xyz="-0.01 0 0"/>
</collision>
</link>
<xacro:ur_arm_transmission prefix="${prefix}" hw_interface="${transmission_hw_interface}" />
<xacro:ur_arm_gazebo prefix="${prefix}" />
<!-- ROS base_link to UR 'Base' Coordinates transform -->
<link name="${prefix}base"/>
<joint name="${prefix}base_link-base_fixed_joint" type="fixed">
<!-- NOTE: this rotation is only needed as long as base_link itself is
not corrected wrt the real robot (ie: rotated over 180
degrees)
-->
<origin xyz="0 0 0" rpy="0 0 ${-pi}"/>
<parent link="${prefix}base_link"/>
<child link="${prefix}base"/>
</joint>
<!-- Frame coincident with all-zeros TCP on UR controller -->
<link name="${prefix}tool0"/>
<joint name="${prefix}wrist_3_link-tool0_fixed_joint" type="fixed">
<origin xyz="0 ${wrist_3_length} 0" rpy="${pi/-2.0} 0 0"/>
<parent link="${prefix}wrist_3_link"/>
<child link="${prefix}tool0"/>
</joint>
<link name="camera"/>
<joint name="$base_link_to_camera" type="fixed">
<parent link="${prefix}base"/>
<child link="camera"/>
<!--origin xyz="-0.0109527 -0.7819547 1.1120832" rpy="3.1415926 0 0"/ -->
<!--origin xyz="-0.0009527 -0.7819547 1.1120832" rpy="3.1415926 0 0"/-->
<!--origin xyz="0.0259527 -0.7819547 1.1120832" rpy="3.1415926 0 0"/-->
<!--origin xyz="0.0182949 -1.25177516 0.3989193" rpy="-1.5707963 0 0"/-->
<!--origin xyz="0.0591778 -1.25177516 0.3589193" rpy="-1.5707963 0 0"/-->
<!--origin xyz="0.0291778 -1.20677516 0.5589193" rpy="-1.5707963 0 0"/-->
<origin xyz="-0.0691778 1.15077516 0.5089193" rpy="-1.5150 0.0160 -3.0716"/>
<!--origin xyz="-0.0491778 1.18677516 0.4589193" rpy="-1.5150 0.0160 -3.0716"/zuihou-->
<!--origin xyz="0.0291778 1.20677516 0.5589193" rpy="1.5707963 0 0"/-->
</joint>
<link name="table">
<visual>
<geometry>
<box size="0.8 0.6 0.05"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="1.5 1.5 0.05"/>
</geometry>
</collision>
</link>
<joint name="table_to_robot" type="fixed">
<parent link="${prefix}base_link"/>
<child link="table"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<link name="wall_left">
<visual>
<geometry>
<box size="0.01 0.6 1.2"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.01 0.6 1.2"/>
</geometry>
</collision>
</link>
<joint name="wall_left_to_robot" type="fixed">
<parent link="${prefix}base_link"/>
<child link="wall_left"/>
<origin xyz="-0.4 0 0.6" rpy="0 0 0"/>
</joint>
<!--link name="wall_right">
<visual>
<geometry>
<box size="0.01 0.6 1.2"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.01 0.6 1.2"/>
</geometry>
</collision>
</link>
<joint name="wall_right_to_robot" type="fixed">
<parent link="${prefix}base_link"/>
<child link="wall_right"/>
<origin xyz="0.4 0 0.6" rpy="0 0 0"/>
</joint-->
<link name="wall_behind">
<visual>
<geometry>
<box size="0.01 0.8 1.2"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.01 0.6 1.2"/>
</geometry>
</collision>
</link>
<joint name="wall_behind_to_robot" type="fixed">
<parent link="${prefix}base_link"/>
<child link="wall_behind"/>
<origin xyz="0 0.3 0.6" rpy="0 0 ${pi/2.0}"/>
</joint>
<link name="wall_up">
<visual>
<geometry>
<box size="0.8 0.6 0.01"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.8 0.6 0.01"/>
</geometry>
</collision>
</link>
<joint name="wall_up_to_robot" type="fixed">
<parent link="${prefix}base_link"/>
<child link="wall_up"/>
<origin xyz="0 0 1.2" rpy="0 0 0"/>
</joint>
</xacro:macro>
</robot>
这个是在官方提供的代码的基础上进行的修改,关于UR5-配置MoveIt!运动学插件IKFAST,参考以下网址:https://blog.csdn.net/harrycomeon/article/details/95517129