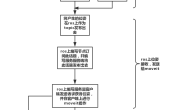
这一块自己参照以下网址配置 https://industrial-training-master.readthedocs.io/en/kinetic/_source/session3/Build-a-Moveit!-Package.html 按照流程配置完后,配置文件放在atur5_moveit_config文件夹下。 然后在apriltags2_client节点下添加moveit
move_target = srv.response.pose;
moveit::planning_interface::MoveGroupInterface move_group("manipulator");
// Plan for robot to move to part
//使用move_group对象的setPoseTarget功能设置所需的笛卡尔目标位置
move_group.setPoseReferenceFrame(base_frame);
move_group.setPoseTarget(move_target);
move_group.move();
运行以下程序,实现单个位姿机械手的移动
roslaunch apriltags2_ros continuous_detection.launch
roslaunch atur5_moveit_config myworkcell_planning_execution.launch
roslaunch apriltags2_launch apriltags2_client.launch
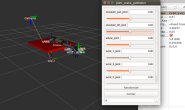
tag相对于world坐标系下的位姿
 最后机械手运动效果图
最后机械手运动效果图
 可以看到ur5的位姿和tag的位姿是一致的,但我想要的效果是UR5朝向tag,所以
可以看到ur5的位姿和tag的位姿是一致的,但我想要的效果是UR5朝向tag,所以
//交换了y,z轴,实现了机械手朝下
move_target = srv.response.pose;
move_target1=srv.response.pose;
move_target.orientation.y=move_target1.orientation.z;
move_target.orientation.z=move_target1.orientation.y;
上面只是关键代码的叙述,要查看完成程序请看github上的代码。 在rviz上的演示gif: