本文为……继续阅读 » 5年前 (2021-04-26) 2760浏览 0评论1278个赞
文件目录结构├─Annotation │ └─XML文件 ├─data │ ├─csv文件 │ └─Record文件 ├─images │ └─图片 ├……继续阅读 » 5年前 (2021-04-26) 2603浏览 0评论851个赞
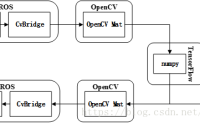
环境:Ubuntu16.04+Tensorflow-cpu-1.6.0+ROS Kinetic+OpenCV3.3.1前期准备:完成Object Detecti……继续阅读 » 5年前 (2021-04-26) 3057浏览 0评论1926个赞
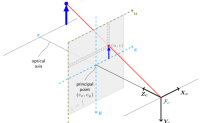
相机标定是用于获取相机畸变,内参数和外参数的一个操作,是机器视觉中不可或缺的一个重要步骤。 畸变是相机因其自身成像特性无法避免产生的图像变形。内参数是对相机内部特性的描述,包括相机图像中心、相机焦距等。外参数描述的是相机在世界坐……继续阅读 » 5年前 (2021-04-26) 2449浏览 0评论1733个赞
相机标定(一)——内参标定与程序实现相机标定(二)——图像坐标与世界坐标转换……继续阅读 » 5年前 (2021-04-26) 2730浏览 0评论2371个赞
相机标定(一)——内参标定与程序实现相机标定(二)——图像坐标与世界坐标转换……继续阅读 » 5年前 (2021-04-26) 2440浏览 0评论2162个赞
相机标定(一)——内参标定与程序实现……继续阅读 » 5年前 (2021-04-26) 1920浏览 0评论1259个赞
环境:Ubuntu16.04+ROS Kinetic 一、kinect v1简介Kinect v1深度相机拥有一个RGB彩色摄像头,一个红外线CMOS摄像机和一个红外发射器。相机的红外线CMOS……继续阅读 » 5年前 (2021-04-26) 3497浏览 0评论1653个赞
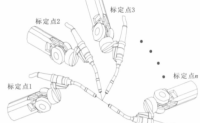
一、标定实现 机器人工具坐标系标定就是确定工具坐标系相对于末端连杆坐标系的变换矩阵 1.1 TCP位置标定 ……继续阅读 » 5年前 (2021-04-26) 3509浏览 0评论899个赞
一、运动规划算法简述 实现流程 通过给定的轨迹点,根据设定的最大速度和加速度计算每个点的速度,加速度和时间帧。 轨迹点:可通过插补获得,数据类型为moveit_msgs::RobotTraje……继续阅读 » 5年前 (2021-04-26) 2950浏览 0评论2573个赞
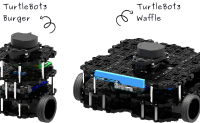
一、概述 机器人开发是一门综合学科,需要用到各方面知识,包括且不限于计算机,数学和物理等各个领域。因其综合程度高使其开发较为繁琐且困难,ROS的出现大大简单了机器人开发的门槛,ROS全称Robot Operating System,本质上是一个分布式系统架构,提……继续阅读 » 5年前 (2021-04-26) 3093浏览 0评论2291个赞
机械臂建模分析:https://blog.csdn.net/Kalenee/article/details/81990130 MoveIt规划下的关节空间运动分析:http://www.guyuehome.com/752 ……继续阅读 » 5年前 (2021-04-26) 3380浏览 0评论598个赞
一、TF2简介 Since ROS Hydro, tf&n……继续阅读 » 5年前 (2021-04-26) 2407浏览 0评论1248个赞
符号意义 x ^ \hat{x}……继续阅读 » 5年前 (2021-04-26) 3303浏览 0评论765个赞
一、简述 一般来说移动机器人的运动模型可分为完整约束和非完整约束。 完整约束(Holonomic,控制数=自由度):可以用一个由位形变量……继续阅读 » 5年前 (2021-04-26) 2286浏览 0评论1853个赞
多姿态插补用于多个连续的姿态,此处采用Squad插值,贝塞尔相关参考深入理解贝塞尔曲线……继续阅读 » 5年前 (2021-04-26) 3350浏览 0评论893个赞
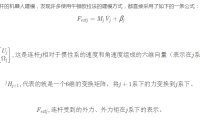
本文为……继续阅读 » 5年前 (2021-04-26) 1686浏览 0评论2884个赞
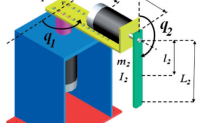
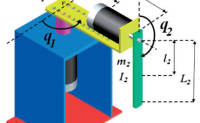
一、动力学基础概念 基本动力学模型 ……继续阅读 » 5年前 (2021-04-26) 3057浏览 0评论1544个赞
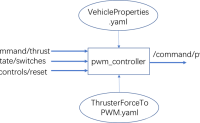
一、简述 机器人控制系统是一个复杂设计,针对不同功能目标有不同的开发路线,若想开发一个通用的控制系统难度会非常高,因此确定目标需求非常重要,这里所述的目标需求有两种,一种为开发基本的控制系统再根据实际条件进行功能添加开发,另外一种为针对特殊情况开发……继续阅读 » 5年前 (2021-04-26) 2284浏览 0评论132个赞
一、概述 相关扩展 C/C++PythonCMakeCMake Toolsvsc……继续阅读 » 5年前 (2021-04-26) 3471浏览 0评论753个赞