URDF文件通过check_urdf pan_tilt.urdf检测是正确的:
robot name is: pan_tilt
---------- Successfully Parsed XML ---------------
root Link: base_link has 1 child(ren)
child(1): pan_link
child(1): tilt_link
但在Rviz中显示时,如下图所示,模型为白色,且tf关系异常:
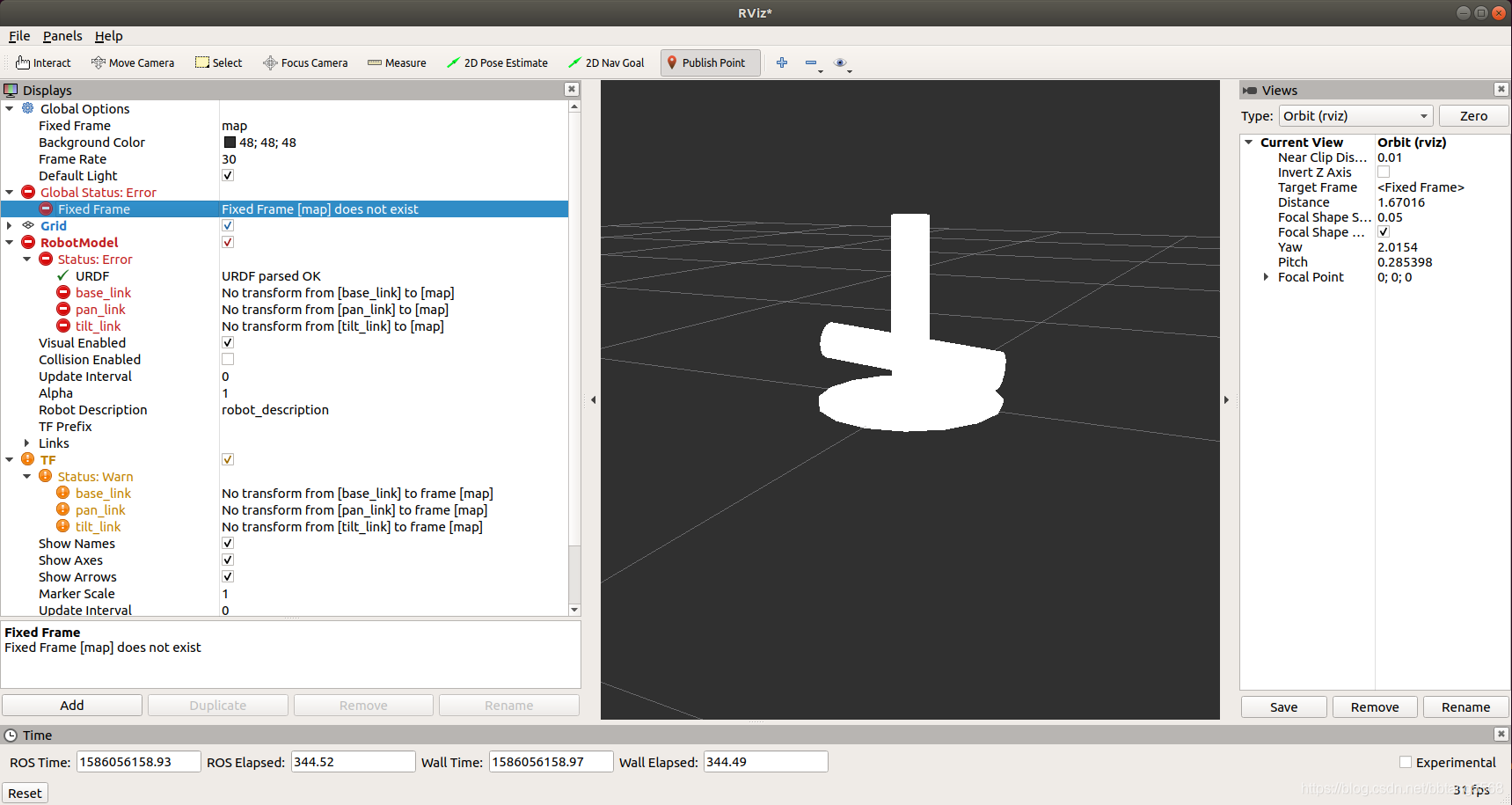 原因是FixedFrame设置不正确,此时的FixedFrame设置值为map,而map是不存在的,此时仅有base_link,pan_link,tilt_link,如下图所示:
原因是FixedFrame设置不正确,此时的FixedFrame设置值为map,而map是不存在的,此时仅有base_link,pan_link,tilt_link,如下图所示:
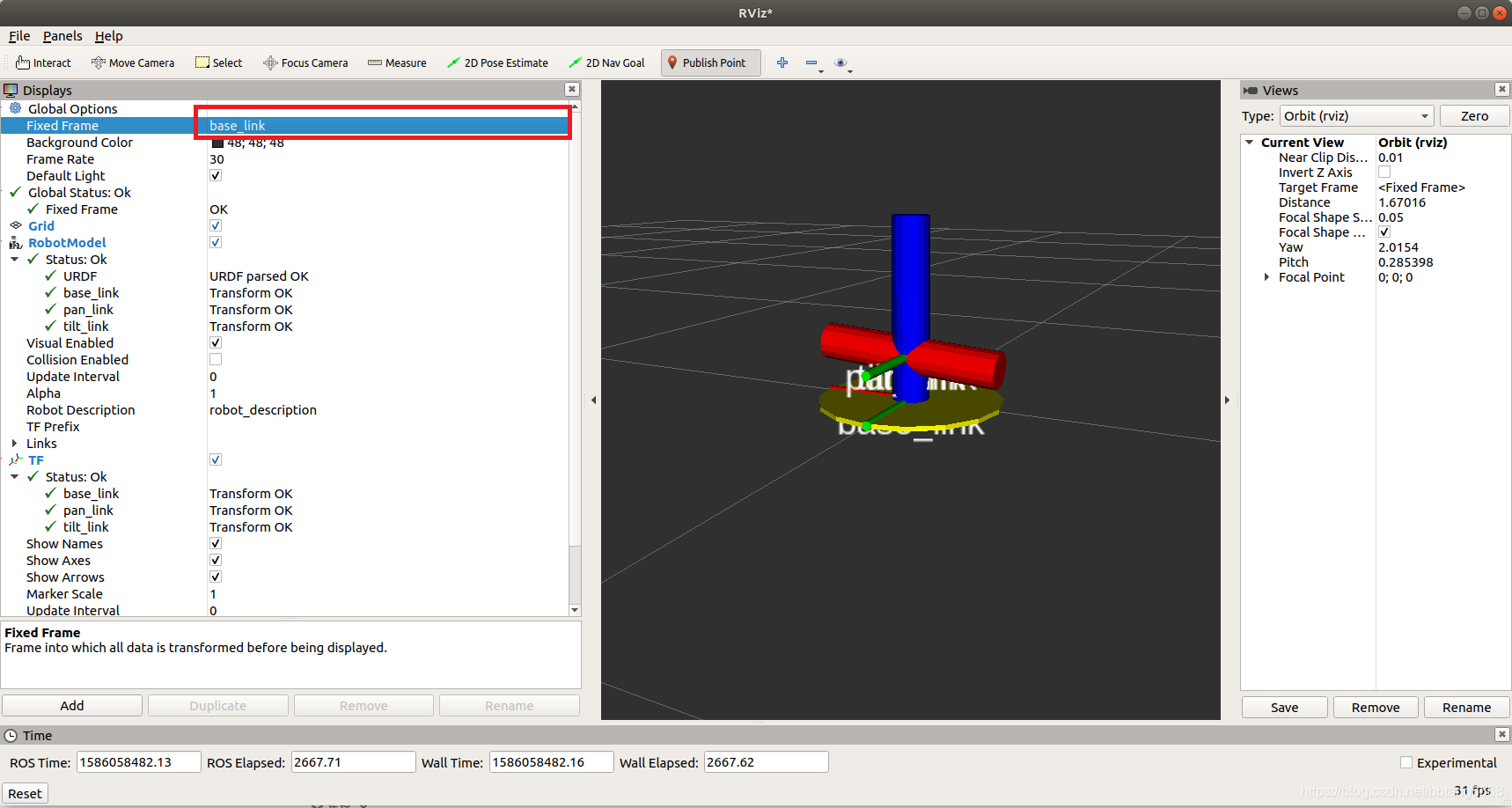
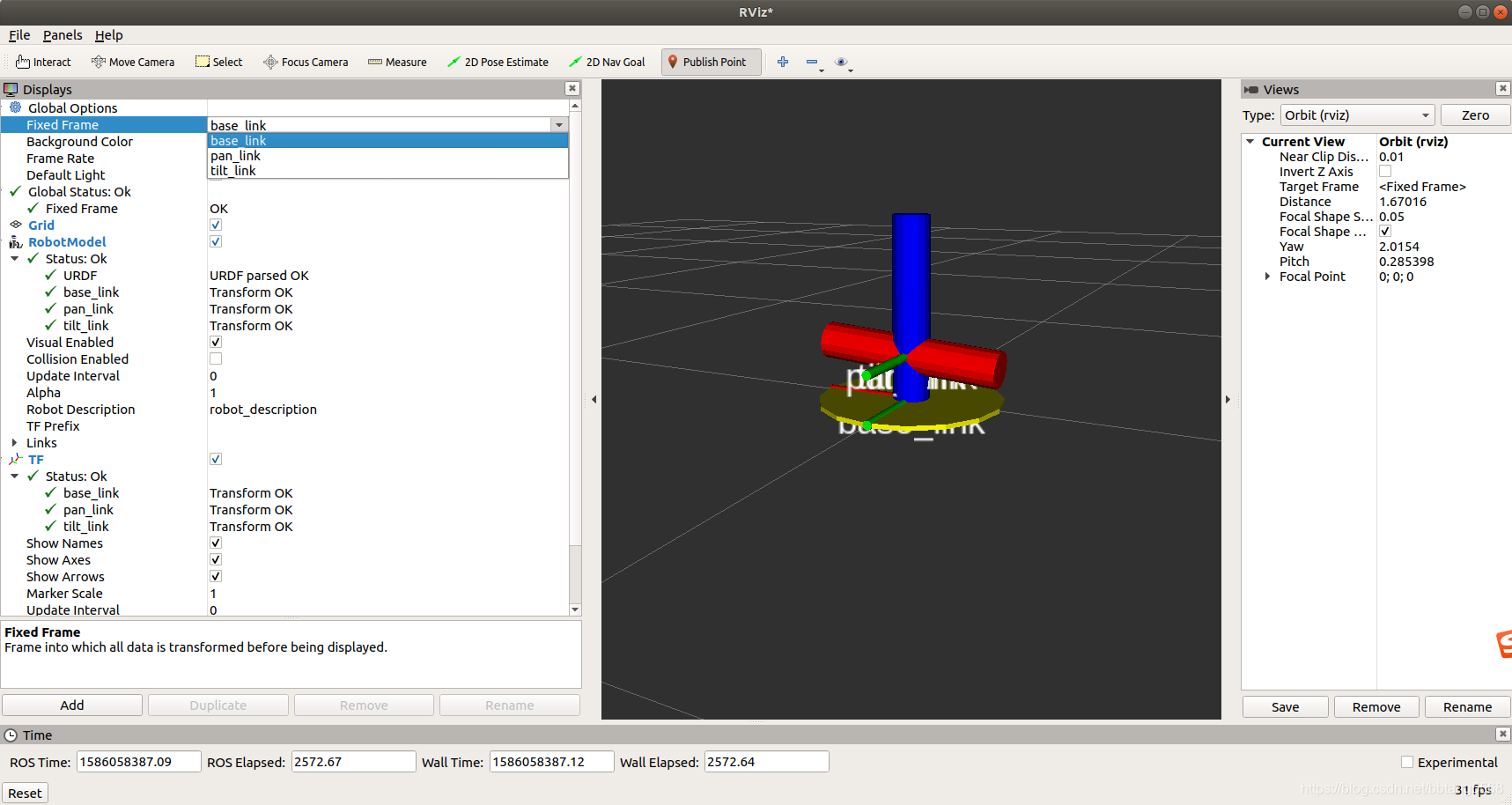 正确的设置为base_link,修改后即可,如下图所示:
正确的设置为base_link,修改后即可,如下图所示: