KDL(kinematic-Dynamic Library)项目是欧洲一些搞机器人的大牛做的一个开源的项目OROCOS(Open Robot Control Software)的一部分,,它产生和发展的历史可见官网(www.orocos.org),对于机器人学领域的同学们,如果想……继续阅读 » 5年前 (2021-04-26) 1764浏览 0评论822个赞
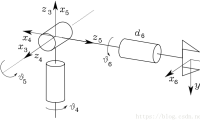
如图1所示的球形手腕(三个关节的轴线相交于一点)是常用的机械臂结构,我们希望在已知坐标系3至坐标系6的旋转矩阵的条件下求解3个关节值……继续阅读 » 5年前 (2021-04-26) 2807浏览 0评论1775个赞
对于串联机器人来说,求逆解的难度要大于求正解,市面上的工业机器人一般是利用的是利用解析法求封闭解,机器人有封闭解是有条件的—Pieper法则。另一种求逆解的方法是利用迭代法求数值解,适用于不满足Pieper法则的构型,……继续阅读 » 5年前 (2021-04-26) 2754浏览 0评论843个赞
很多同学会把路径规划(Path Planning)和轨迹规划(Trajectory Planning)这两个概念混淆,路径规划只是表示了机械臂末端在操作空间中的几何信息,比如从工作台的一端(A点)沿直线移动到另一端(B点)。而轨迹规划则加上了时间律,比如它要完成的任务是从A点开始……继续阅读 » 5年前 (2021-04-26) 3590浏览 0评论1665个赞
机械臂的逆动力学问题可以认为是:已知机械臂各个连杆的关节的运动(关节位移、关节速度和关节加速度),求产生这个加速度响应所需要的力/力矩。KDL提供了两个求解逆动力学的求解器,其中一个是牛顿欧拉法,这个方法是最简单和高效的方法。 牛顿欧拉法算法可以分为三个步骤: st……继续阅读 » 5年前 (2021-04-26) 2293浏览 0评论231个赞
这篇文章试图说清楚两件事:1. 几何雅克比矩阵的本质;2. KDL如何求解机械臂的几何雅克比矩阵。 一、几何雅克比矩阵的本质 机械臂的关节空间的速度可以映射到执行器末端在操作空间的速度,这种映射可以通过一个矩阵来描述,……继续阅读 » 5年前 (2021-04-26) 2018浏览 0评论2866个赞
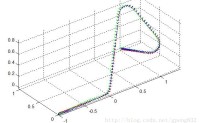
本文的内容是对另一篇文章(链接)的补充,对Trajectory_example.cpp涉及到的原理作一些简单的讲解,主要内容是: (1)机器人路径规划圆弧过渡的原理;……继续阅读 » 5年前 (2021-04-26) 2325浏览 0评论783个赞
通过学习KDL开源项目的代码可以学习CMake构建程序的知识,现简单介绍一下orocos_kinematics_dynamics-master\orocos_kinematics_dynamics-master\orocos_kdl\examples\CMakeList.txt文……继续阅读 » 5年前 (2021-04-26) 1833浏览 0评论2593个赞
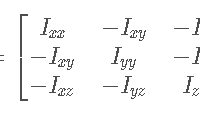
一、刚体的惯性张量 在单自由度系统中,常常要考虑刚体的质量。对于定轴转动的情况,经常用到惯量矩这个概念。对一个可以在三维空间自由运动的刚体来说,可能存在无穷个旋转轴。在一个刚体绕任意轴做旋转运动时,我们需要一种能够表征刚体质量分布的方法。在这里,我们需要引入惯性张量……继续阅读 » 5年前 (2021-04-26) 2137浏览 0评论1253个赞
首先说一下我的心得: 1. 我认为KDL的精髓是Spatial Vector,结合C++等面向对象的语言可以写出较好的软件。 2. 直接阅读KDL代码不适合初学者学习机械臂动力学。 3. 要学习机械臂动力学的话应首先阅读使用3维向量推导公式的文献,也就是线速度和角速……继续阅读 » 5年前 (2021-04-26) 3190浏览 0评论1900个赞
URDF(Universal Robot Description Format)——通用机器人描述格式,它是ROS里边使用的一种机器人的描述文件,包含的内容有:连杆、关节,运动学和动力学参数、可视化模型、碰撞检测模型等。 到目前为止,本……继续阅读 » 5年前 (2021-04-26) 2040浏览 0评论2404个赞