机械臂的逆动力学问题可以认为是:已知机械臂各个连杆的关节的运动(关节位移、关节速度和关节加速度),求产生这个加速度响应所需要的力/力矩。KDL提供了两个求解逆动力学的求解器,其中一个是牛顿欧拉法,这个方法是最简单和高效的方法。 牛顿欧拉法算法可以分为三个步骤: step1:计算每个连杆质心的速度和加速度; step2:计算产生这些加速度所需要的合力; step3:计算其它连杆通过关节对每个连杆施加的力。 KDL中的牛顿欧拉法的代码是基于文献《Rigid Body Dynamics Algorithms》写的,这本书中使用了spatial vector的概念,spatial vector将3维的刚体的线性运动(力)和3维的旋转运动(力)组合到一起形成6维的,这样处理会使代码便于阅读(关于Spatial Vector可以看另外一篇博客-KDL的精髓)。 下表为KDL中逆动力学的伪代码(这个表也是从《Rigid Body Dynamics Algorithms》截的图,KDL的代码和这些公式不是完全对应的,要完全理解KDL的思想需要把这本书过一遍)。
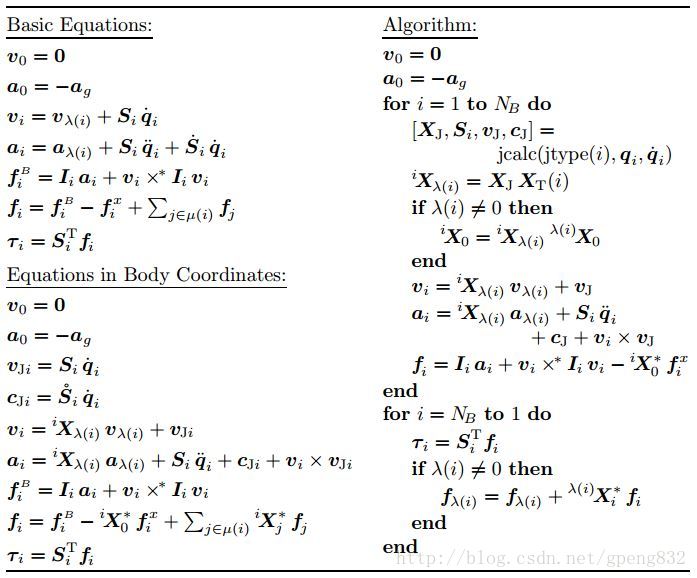
图1 牛顿欧拉法的伪代码
int ChainIdSolver_RNE::CartToJnt(const JntArray &q, const JntArray &q_dot, const JntArray &q_dotdot, const Wrenches& f_ext,JntArray &torques)
{
if(q.rows()!=nj || q_dot.rows()!=nj || q_dotdot.rows()!=nj || torques.rows()!=nj || f_ext.size()!=ns)
return (error = E_SIZE_MISMATCH);
unsigned int j=0;
for(unsigned int i=0;i<ns;i++){
double q_,qdot_,qdotdot_;
if(chain.getSegment(i).getJoint().getType()!=Joint::None){
q_=q(j);
qdot_=q_dot(j);
qdotdot_=q_dotdot(j);
j++;
}else
q_=qdot_=qdotdot_=0.0;
X[i]=chain.getSegment(i).pose(q_);
Twist vj=X[i].M.Inverse(chain.getSegment(i).twist(q_,qdot_));
S[i]=X[i].M.Inverse(chain.getSegment(i).twist(q_,1.0));
if(i==0){
v[i]=vj;
a[i]=X[i].Inverse(ag)+S[i]*qdotdot_+v[i]*vj;
}else{
v[i]=X[i].Inverse(v[i-1])+vj;
a[i]=X[i].Inverse(a[i-1])+S[i]*qdotdot_+v[i]*vj;
}
RigidBodyInertia Ii=chain.getSegment(i).getInertia();
f[i]=Ii*a[i]+v[i]*(Ii*v[i])-f_ext[i];
}
j=nj-1;
for(int i=ns-1;i>=0;i--){
if(chain.getSegment(i).getJoint().getType()!=Joint::None)
torques(j--)=dot(S[i],f[i]);
if(i!=0)
f[i-1]=f[i-1]+X[i]*f[i];
}
return (error = E_NOERROR);
}
在阅读代码的时候,大家比较关心的可能是代码段与公式的对应关系,由于KDL的代码非常简短(原因是使用了Spatial Vector),所以这里把关键代码与文献中的公式对应起来,便于阅读代码):
X[i]=chain.getSegment(i).pose(q_);
求解转换矩阵![]() ,表示父连杆坐标系向子连杆坐标系的坐标变换。
,表示父连杆坐标系向子连杆坐标系的坐标变换。
vj=X[i].M.Inverse(chain.getSegment(i).twist(q_,qdot_));
求解关节引起的连杆速度vJ,它的意义是求出连杆的速度后,再左乘一个转置矩阵,将速度的参考坐标系变换到本体上的坐标系,这与上图中的伪代码的公式(vJi=siqi)不一样。
v[i]=X[i].Inverse(v[i-1])+vj;
求解连杆末端的速度
![]() ,它的参考坐标系为与本体固连的坐标系。
,它的参考坐标系为与本体固连的坐标系。
a[i]=X[i].Inverse(a[i-1])+S[i]*qdotdot_+v[i]*vj;
这行代码是求解连杆的加速度
![]()
RigidBodyInertia Ii=chain.getSegment(i).getInertia();
f[i]=Ii*a[i]+v[i]*(Ii*v[i])-f_ext[i];
获取机械臂的动力学参数(质量、惯性张量、连杆坐标系到连杆质心偏移)、f[i]求解父连杆通过关节施加给连杆的力。代码中的运算符 * 是KDL中自定义的运算符,可见另一篇博客-KDL的精髓。
torques(j--)=dot(S[i],f[i]);
这行代码求解关节力或力矩
![]() ,至此,各个关节的力或力矩均会被求出,算法结束。 参考文献: [1] 《Rigid Body Dynamics Algorithms》. Roy Featherstone, 2008
,至此,各个关节的力或力矩均会被求出,算法结束。 参考文献: [1] 《Rigid Body Dynamics Algorithms》. Roy Featherstone, 2008




