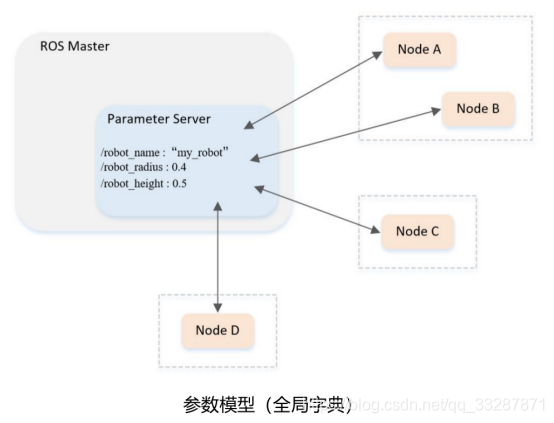
参数模型
 创建功能包
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_parameter roscpp rospy std_srvs
 参数命令行使用 rosparam ⚫ 列出当前多有参数 $ rosparam list YAML参数文件 ⚫ 显示某个参数值 $ rosparam get param_key ⚫ 设置某个参数值 $ rosparam set param_key param_value ⚫ 保存参数到文件 $ rosparam dump file_name ⚫ 从文件读取参数 $ rosparam load file_name ⚫ 删除参数 $ rosparam delete param_key
参数命令行使用 rosparam ⚫ 列出当前多有参数 $ rosparam list YAML参数文件 ⚫ 显示某个参数值 $ rosparam get param_key ⚫ 设置某个参数值 $ rosparam set param_key param_value ⚫ 保存参数到文件 $ rosparam dump file_name ⚫ 从文件读取参数 $ rosparam load file_name ⚫ 删除参数 $ rosparam delete param_key
 编程方法
编程方法
/**
* 该例程设置/读取海龟例程中的参数
*/
#include <string>
#include <ros/ros.h>
#include <std_srvs/Empty.h>
int main(int argc, char **argv)
{
int red, green, blue;
// ROS节点初始化
ros::init(argc, argv, "parameter_config");
// 创建节点句柄
ros::NodeHandle node;
// 读取背景颜色参数
ros::param::get("/background_r", red);
ros::param::get("/background_g", green);
ros::param::get("/background_b", blue);
ROS_INFO("Get Backgroud Color[%d, %d, %d]", red, green, blue);
// 设置背景颜色参数
ros::param::set("/background_r", 255);
ros::param::set("/background_g", 255);
ros::param::set("/background_b", 255);
ROS_INFO("Set Backgroud Color[255, 255, 255]");
// 读取背景颜色参数
ros::param::get("/background_r", red);
ros::param::get("/background_g", green);
ros::param::get("/background_b", blue);
ROS_INFO("Re-get Backgroud Color[%d, %d, %d]", red, green, blue);
// 调用服务,刷新背景颜色
ros::service::waitForService("/clear");
ros::ServiceClient clear_background = node.serviceClient<std_srvs::Empty>("/clear");
std_srvs::Empty srv;
clear_background.call(srv);
sleep(1);
return 0;
}
配置代码编译规则 如何配置CMakeLists.txt中的编译规则 • 设置需要编译的代码和生成的可执行文件; • 设置链接库;
add_executable(parameter_config src/parameter_config.cpp)
target_link_libraries(parameter_config ${catkin_LIBRARIES})
编译并运行发布者
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun learning_parameter parameter_config
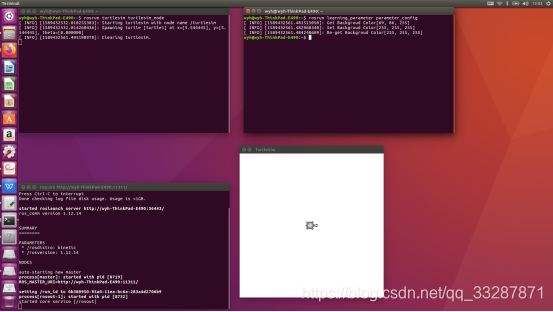 在运行发布者的终端中我们可以看到节点原始数据和修改之后的值以及小海龟仿真器的背景色变成了白色。
在运行发布者的终端中我们可以看到节点原始数据和修改之后的值以及小海龟仿真器的背景色变成了白色。




