声明:本文整理自网络,内容仅作博主学习笔记记录,版权归原作者所有! 官方参考文档:
- https://www.mathworks.com/help/ros/index.html?s_tid=CRUX_lftnav
- https://www.mathworks.com/help/ros/ros-in-simulink.html?s_tid=CRUX_lftnav
1. ROS环境变量设置
% 检测标准ROS环境变量的值
getenv('ROS_MASTER_URI')
getenv('ROS_HOSTNAME')
getenv('ROS_IP')
% 设置ROS环境变量的值
setenv('ROS_MASTER_URI','http://192.168.1.1:11311')
setenv('ROS_IP','192.168.1.100')
rosinit
参考链接:https://www.ncnynl.com/archives/201909/3289.html
2. ROS初始化及常用指令
默认情况下, “rosinit” 指令在MATLAB中创建一个ROS主控节点并开始了一个“global node”节点,该节点与主控节点相连。“global node”节点能够自动的被其它ROS函数使用。该节点被分配给一个随机产生的独一无二的名称。所有的发布器、订阅器、服务终端和服务器都将在这个全局节点运行。
% 初始化ROS网络
rosinit
% 连接到外部ROS主控节点
rosinit('192.168.1.1') % 默认端口为11311
rosinit('master_host') % 默认端口为11311
rosinit('master_host', 12000) % 指定端口为12000
rosinit('http://192.168.1.1:12000') % 通过主控节点完整URI连接并创建全局节点
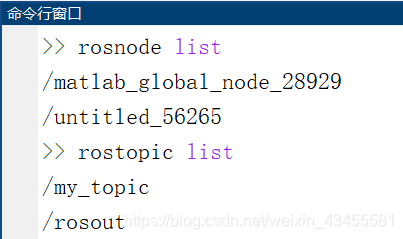
% 列出当前节点
rosnode list
% 列出当前话题
rostopic list
% 列出当前服务
rosservice list
% 查看指定节点的具体信息
rosnode info /node_name
% 查看指定话题的具体信息
rostopic info /topic_name
% 查看指定服务的具体信息
rosservice info /service_name
% 查看指定消息类型
rostopic type /topic_name
% 查看指定消息类型的属性
rosmsg show geometry_msgs/Twist
% 查看MATLAB中所有可用消息类型
rosmsg list
% 关闭ROS网络
rosshutdown
参考链接:https://www.ncnynl.com/archives/201909/3288.html
3. ROS消息的使用
基本消息的使用
% 查看ROS话题数据类型的具体结构
scandata = rosmessage('sensor_msgs/LaserScan')
% 定义一个与LaserScan相同类型的消息
scantype = rostype.sensor_msgs_LaserScan
scandata = rosmessage(scantype)
% 查看candata的ScanTime属性(`.`后使用Tab键补全)
scandata.ScanTime
% 以geometry_msgs/Twist消息为例,假设消息变量为posedata,访问Linear的X
xpos = posedata.Linear.X
% 快速查看消息中包含的所有数据
showdetails(posedata)
% 设置或填充消息数据
twist = rosmessage(rostype.geometry_msgs_Twist)
twist.Linear.Y = 5
% 共享数据式消息复制
twistCopyRef = twist %如果修改twistCopyRef,twist也会跟着改变,两者类似于两个指针指向同一个变量
% 独立式消息复制(复制体与原消息体不发生干涉)
twistCopyDeep = copy(twist)
% 数据保存
save('posedata.mat','posedata')
% 重新加载文件到工作空间之前需要清除'posedata'变量
clear posedata
% 加载保存的消息数据
messageData = load('posedata.mat')
% 查看消息内容
messageData.posedata
% 删除MAT文件
delete('posedata.mat')
参考链接:https://www.ncnynl.com/archives/201909/3290.html
ROS消息的进阶使用
- 激光传感器消息的使用
% 消息的创建,其他数据填充参考上述内容
scanMsg = rosmessage(rostype.sensor_msgs_LaserScan)
% 为了后面的演示,此处使用例程载入激光数据
exampleHelperROSLoadMessages
% 获取笛卡尔坐标下的测量点
xy = readCartesian(scan)
% 数据可视化
plot(scan,'MaximumRange',5)
- 图像消息的使用
% 消息的创建,其他数据填充参考上述内容
emptyimg = rosmessage(rostype.sensor_msgs_Image)
% 为了后面的演示,此处使用例程载入图像数据
exampleHelperROSLoadMessages
% 注意,'Data'存储的是原始图像数据,MATLAB不能直接处理或可视化
% 原始的图像的编码格式为'rgb8'
% 我们可使用'readImage'将其恢复成MATLAB可读的图像格式
% 默认情况下'readImage'返回的是480x640x3的uint8格式
imageFormatted = readImage(img)
% 查看图像
imshow(imageFormatted)
% 使用'rosmessage'创建一个空的压缩图像消息
emptyimgcomp = rosmessage(rostype.sensor_msgs_CompressedImage)
% 用户可以使用'readImage'函数标准的RGB格式的图像,即使图像原始编码格式是bgr8,readImage也能做相应的转换
compressedFormatted = readImage(imgcomp)
% 查看图像
imshow(compressedFormatted)
- 点云消息的使用
使用'rosmessage'创建一个空的标准点云消息
emptyptcloud = rosmessage(rostype.sensor_msgs_PointCloud2)
% 查看例程中的点云数据,该消息存储在'ptcloud'变量中
ptcloud
xyz = readXYZ(ptcloud)
% 上述点云数据会出现NaN无效值,这是Kinect一种伪像,安全移除NaN值的操作如下:
xyzvalid = xyz(~isnan(xyz(:,1)),:)
% 查看点云RGB数据
rgb = readRGB(ptcloud)
% 点云可视化
scatter3(ptcloud)
 参考链接:https://www.ncnynl.com/archives/201909/3292.html
参考链接:https://www.ncnynl.com/archives/201909/3292.html
自定义消息的使用
将ROS消息定义转换为MATLAB时,字段名称将转换为消息对象的属性。对象属性始终以大写字母开头,并且不包含下划线。修改字段名称以适合此命名约定。下划线的第一个字母和第一个字母大写,下划线删除。例如,sensor_msgs/Image消息在ROS中具有以下字段:
- header
- height
- width
- encoding
- is_bigendian
- step
- data
根据这一规则,转换成MATLAB结构后:
- Header
- Height
- Width
- Encoding
- IsBigendian
- Step
- Data
消息自定义步骤:
- STEP1:自定义消息结构

- STEP2:调用
rosgenmsg函数将消息类型转换为有效的MATLAB代码
folderpath = "C:/Users/user1/Documents/robot_custom_msg/";
rosgenmsg(folderpath)
- STEP3:将生成的类文件添加到MATLAB路径当中
addpath('matlab/myfiles')
savepath matlab/myfiles/pathdef.m %将当前搜索路径保存到位于matlab/myfiles/pathdef.m
- STEP4:刷新所有消息类定义
clear classes
rehash toolboxcache
- STEP5:验证消息是否可用
rosmsg list
参考链接:
- https://ww2.mathworks.cn/help/ros/ref/rosgenmsg.html
- https://ww2.mathworks.cn/help/ros/ug/ros-custom-message-support.html
4. 订阅者和发布者的使用
% 查看可用的消息类型
rostype.getMessageList
订阅者的使用
% 订阅/scan话题
laser = rossubscriber('/scan')
% 数据接收(参数二:超时时间/s)
scandata = receive(laser,10)
% 数据可视化('MaximumRange'指定了曲线的最大值范围)
plot(scandata,'MaximumRange',7)
% 使用回调函数代替receive的数据订阅
robotpose = rossubscriber('/pose',@exampleHelperROSPoseCallback)
% 定义两个全局变量用来实现主工作空间与回调函数之间的数据共享
global pos
global orient % 从“/pose”主题中接收到新消息时,全局变量'pos”'和'orient'将在'exampleHelperROSPoseCallback'回调函数中赋值。
% 订阅者的终止(通过清除相关变量来实现)
clear robotpose
发布者的使用
% 创建发布者到'/chatter'话题
chatterpub = rospublisher('/chatter',rostype.std_msgs_String)
% 创建一个测试用的订阅者
chattersub = rossubscriber('/chatter', @exampleHelperROSChatterCallback)
% 创建并填充ROS消息
chattermsg = rosmessage(chatterpub)
chattermsg.Data = 'hello world'
% 发布数据到'/chatter'话题上
send(chatterpub,chattermsg)
参考链接:https://www.ncnynl.com/archives/201909/3291.html
5. 服务端和客户端的使用
% 查看可用的服务类型
rostype.getServiceList
服务端的使用
% 使用'rossvcserver'创建一个服务器
testserver = rossvcserver('/test', rostype.std_srvs_Empty, @exampleHelperROSEmptyCallback)
% 查看'/test'服务的信息
rosservice info /test
客户端的使用
% 使用'rossvcclient'创建一个客户端
testclient = rossvcclient('/test')
% 创建服务请求函数
testreq = rosmessage(testclient)
% 请求的参数设置(此处假设MessageType中有两个参数A、B)
testreq.A = 2
testreq.B = 1
% 获取服务器响应
testresp = call(testclient,testreq,'Timeout',3)
参考链接:https://www.ncnynl.com/archives/201909/3293.html
6. ROS参数服务器的使用
% 启动一个新的参数服务器
ptree = rosparam
% 检查是否存在指定名称的参数(如果没有返回0)
has(ptree,'ROBOT_IP')
% 添加新参数至参数服务器
set(ptree,'ROBOT_IP','192.168.1.1');
set(ptree, '/myrobot/ROBOT_IP','192.168.1.100');
set(ptree,'MAX_SPEED',1.5);
set(ptree, '/myrobot/ROBOT_NAME','TURTLE');
set(ptree, '/myrobot/MAX_SPEED',1.5);
set(ptree, '/newrobot/ROBOT_NAME','NEW_TURTLE');
% 获取参数值
robotIP = get(ptree, '/myrobot/ROBOT_IP')
% 获取所有储存在参数服务器上的参数列表
plist = ptree.AvailableParameters
% 修改已有参数(对参数进行修改的数值可以与之前分配的数据类型不同)
set(ptree, 'MAX_SPEED', 1.0);
% 删除参数
del(ptree, 'ROBOT_IP');
% 测试是否删除成功
has(ptree, 'ROBOT_IP')
% 搜索包含指定名称空间的参数
results = search(ptree, 'myrobot')
7. ROS – tf树的访问及使用
tf数据的访问
% 查看tf信息
tf
% 查看tf的Transforms结构
tf.Transforms
% 查看tf.Transforms中Transforms对象的属性
tf.Transforms.Transform
% 返回Transform字段的值
cellTransforms = {tf.Transforms.Transform}
% 通过索引方式访问指定对象实体
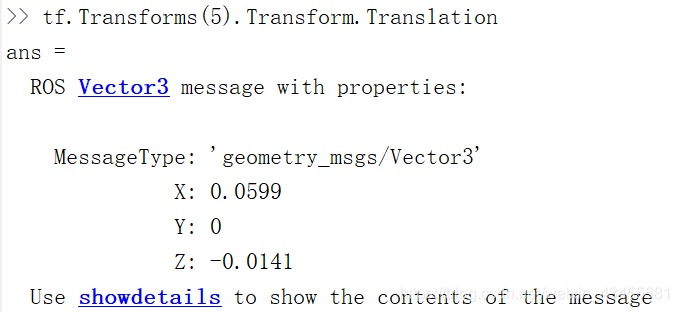
tf.Transforms(5)
tf.Transforms(5).Transform.Translation
tf树的使用
% 加载例程数据
exampleHelperROSStartTfPublisher
% 使用'rostf'创建新的tf树对象
tftree = rostf
% 使用'AvailableFrames'查看
tftree.AvailableFrames
% 获取变换
mountToCamera = getTransform(tftree, 'mounting_point', 'camera_center');
% 获取变换中的平移信息
mountToCameraTranslation = mountToCamera.Transform.Translation
% 获取变换中的旋转信息并将其转为欧拉角
quat = mountToCamera.Transform.Rotation
mountToCameraRotationAngles = rad2deg(quat2eul([quat.W quat.X quat.Y quat.Z]))
% 等待有效的变换(将会堵塞,知道变换可获得)
waitForTransform(tftree, 'robot_base', 'camera_center');
% 将相机中心坐标系下的点转换到robot_base坐标下
% 数据填充
pt = rosmessage('geometry_msgs/PointStamped');
pt.Header.FrameId = 'camera_center';
pt.Point.X = 3;
pt.Point.Y = 1.5;
pt.Point.Z = 0.2;
% 变换
tfpt = transform(tftree, 'robot_base', pt)
% 获取变换结果
tfpt.Point
% 发布变换
% 数据填充
tfStampedMsg = rosmessage('geometry_msgs/TransformStamped');
tfStampedMsg.ChildFrameId = 'wheel';
tfStampedMsg.Header.FrameId = 'robot_base';
tfStampedMsg.Transform.Translation.X = 0;
tfStampedMsg.Transform.Translation.Y = -0.2;
tfStampedMsg.Transform.Translation.Z = -0.3;
quatrot = axang2quat([0 1 0 deg2rad(30)])
tfStampedMsg.Transform.Rotation.W = quatrot(1);
tfStampedMsg.Transform.Rotation.X = quatrot(2);
tfStampedMsg.Transform.Rotation.Y = quatrot(3);
tfStampedMsg.Transform.Rotation.Z = quatrot(4);
tfStampedMsg.Header.Stamp = rostime('now');
% 发送上述设置的变换
sendTransform(tftree, tfStampedMsg)
% 查看变换列表,看是否发布成功
tftree.AvailableFrames
参考链接:https://www.ncnynl.com/archives/201909/3296.html
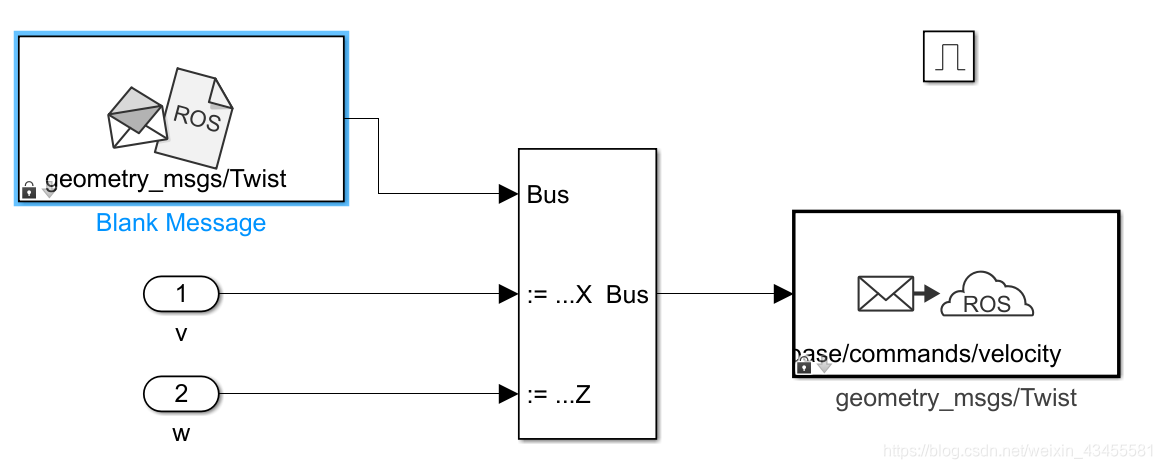
8. ROS在Simulink中的使用
首先要启动ROS:rosinit 用到的Simulink模块:
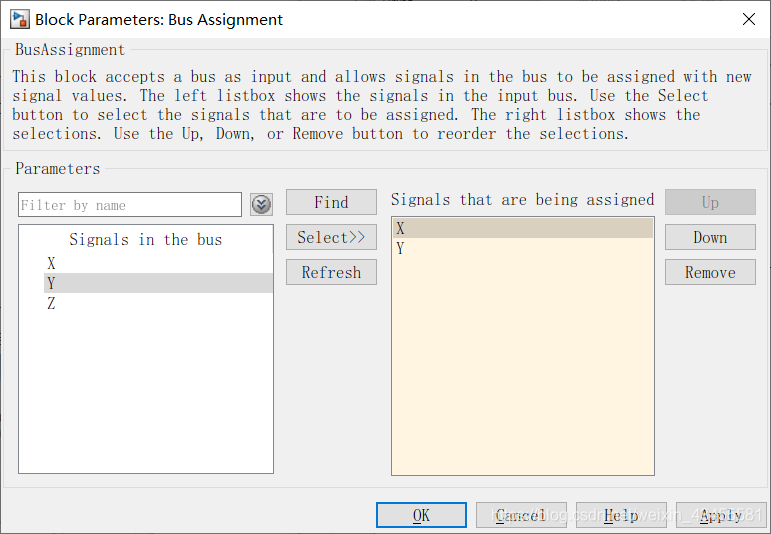
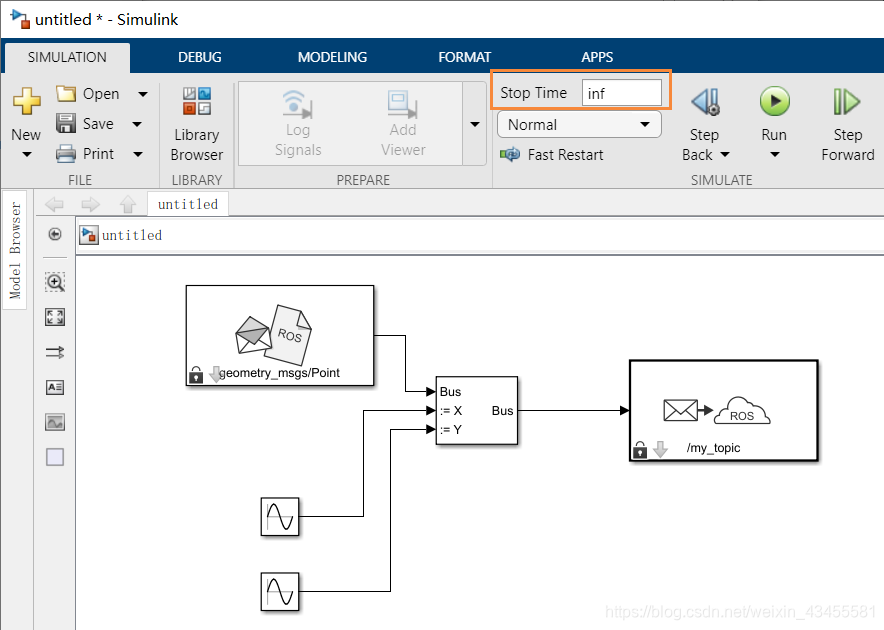
- Simulink → Signal Routing → Bus Assignment
- Simulink → Signal Routing
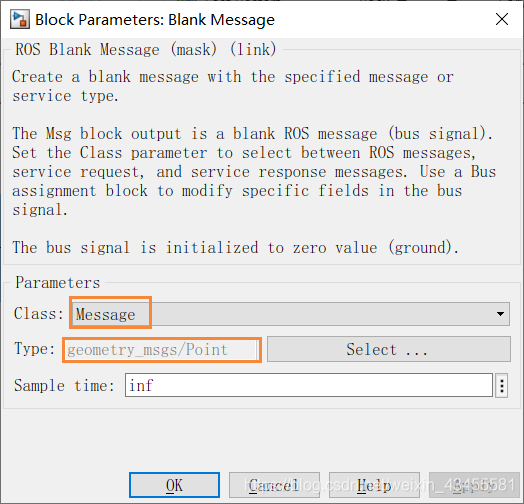
- ROS Toolbox → ROS → Blank Message
- ROS Toolbox → ROS → Publish
- Simulink → Sources → Sine Wave
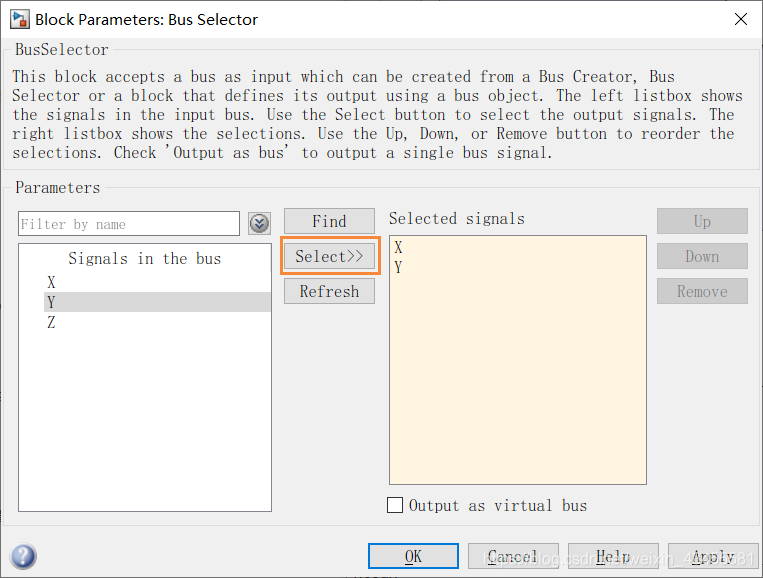
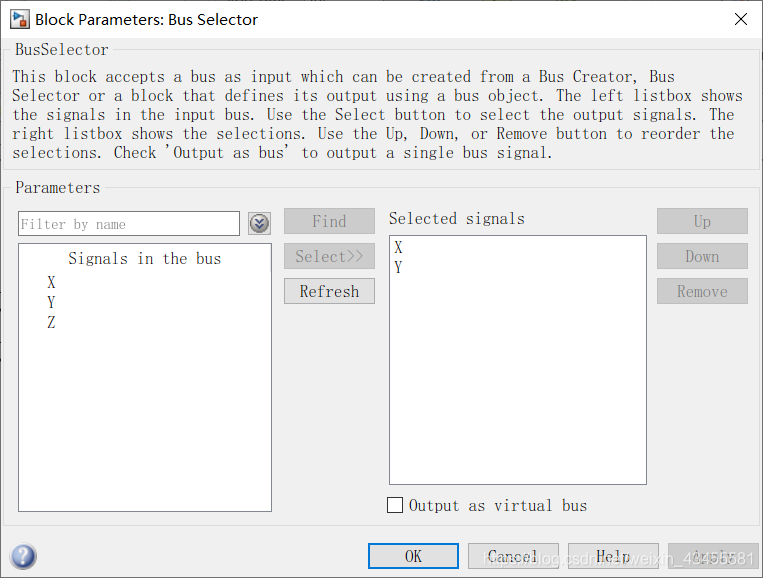
- Simulink → Signal Routing → Bus Selector
- Simulink → Sinks → Terminator
- Simulink → Sinks → XY Graph
- Simulink → Sinks → Display
- Simulink → Ports & Subsystems → Enabled
a. 基本订阅者发布者的使用
发布者模块设置及测试

 运行以后发现:
运行以后发现:
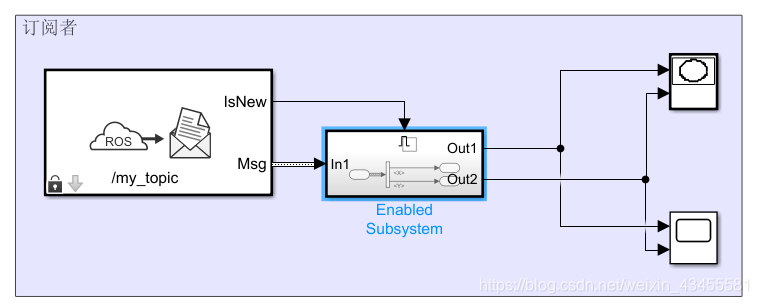
订阅者模块设置及测试
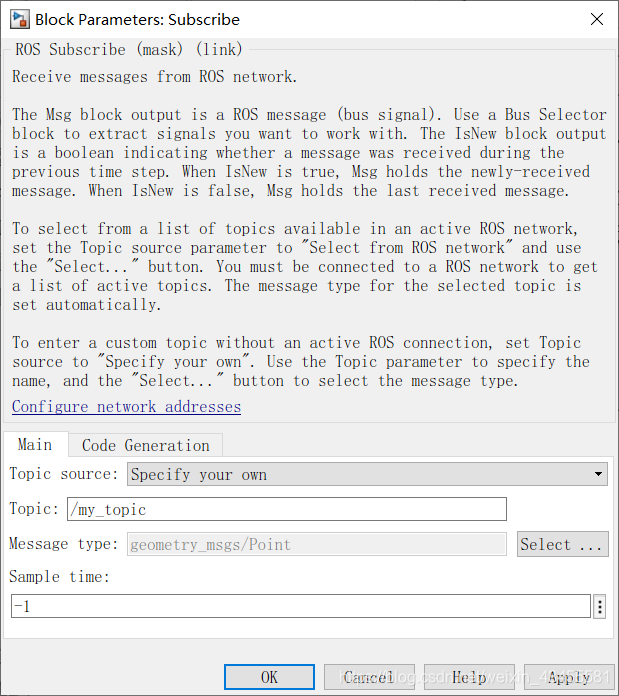
Subscribe模块中的
IsNew属性输出在时间步进期间消息是否已被接收
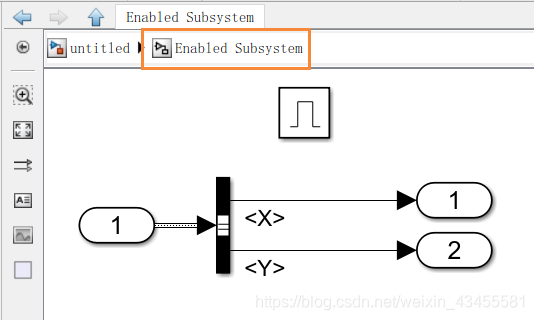
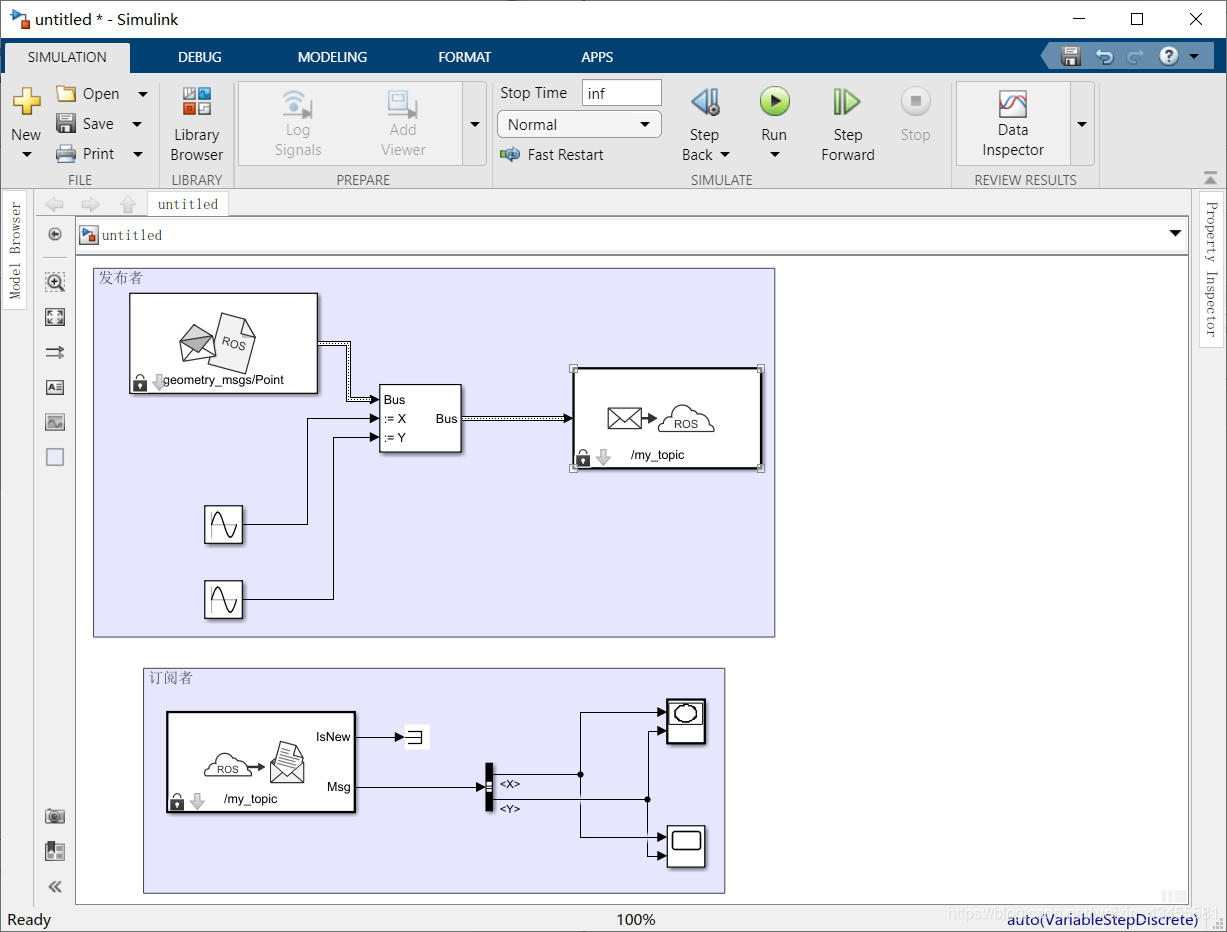 增加一个使能子系统
增加一个使能子系统
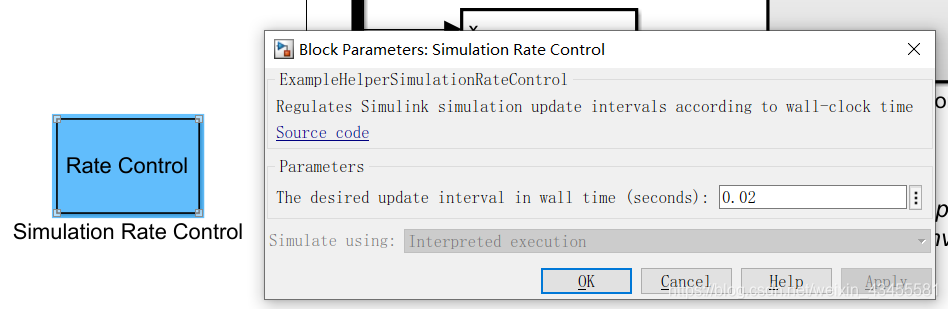
配置并运行Simulink模型
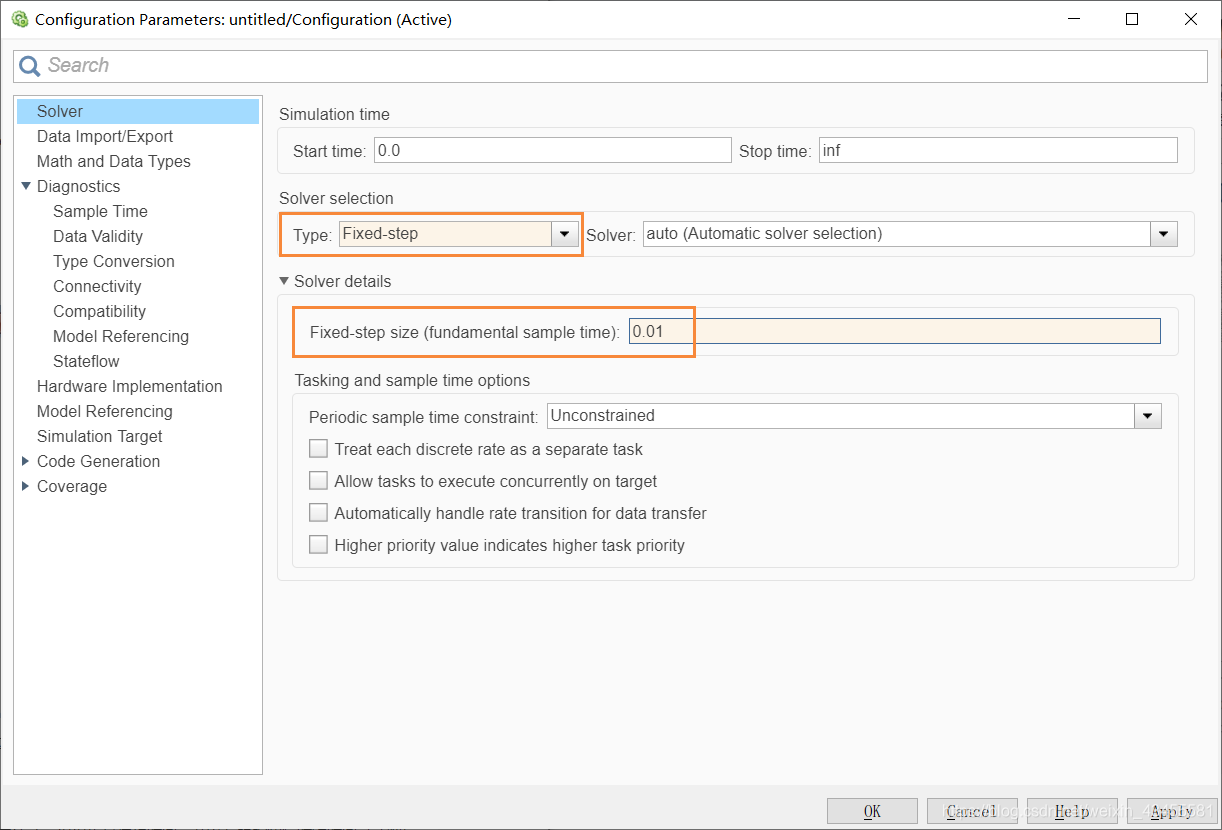
注意:仿真并不是以实际或真实时间工作,仅仅是仿真进程时间而已!
参考链接:
- https://www.ncnynl.com/archives/201909/3297.html
- https://www.ncnynl.com/archives/201909/3298.html
- https://www.mathworks.com/help/ros/ug/publish-and-subscribe-to-ros-messages-in-simulink.html
- https://www.mathworks.com/help/ros/ref/publish.html
b. Simulink中ROS消息的使用
具体通过Blank Message模块来实现,参考案例robotROSMessageUsageExample。
c. 反馈控制
具体案例参考如下案例
robotROSFeedbackControlExample
注意:如果画出
IsNew的信号将会发现,输入消息并不是周期的,该现象是由于仿真进程时间与真实时间不同造成的,仿真执行循环是由模型复杂度和计算机计算速度决定的,具体参阅Simulation Loop Phase。 如果使能的子系统没有被应用,那么模型将一直重复处理相同的消息(最新接收的),从而导致控制消息的浪费处理和多余发布,使能子系统可以帮助确认模型仅仅处理真正的新消息。
参考链接:https://www.ncnynl.com/archives/201909/3299.html
d. 从Simulink中创建单独的ROS节点
具体参考如下链接。 参考链接:
- https://www.ncnynl.com/archives/201909/3300.html
- https://blog.csdn.net/weixin_42313598/article/details/105090597
9. ROSbag的使用
% 使用'rosbag'载入bag文件,路径可使用绝对或相对方式
bag = rosbag(filepath)
% 获取'AvailableTopics'属性,查看bag文件中有关话题和消息类型等信息
bag.AvailableTopics
% 恢复消息前,用户须基于时间戳、话题名称或消息类型选择一系列消息
% 查看当前选择的所有消息(第一列为时间戳):
bag.MessageList
% 使用'select'筛选消息
bagselect1 = select(bag, 'Topic', '/odom')
% 筛选前30s发布的'/odom'消息列表
start = bag.StartTime
bagselect2 = select(bag, 'Time', [start start + 30], 'Topic', '/odom')
% 筛选指定时间段的消息列表
bagselect3 = select(bagselect2, 'Time', [205 206])
% 多项筛选规则的使用
selectOptions = {'Time', [start, start+1; start+5, start+6], 'MessageType', {'sensor_msgs/LaserScan', 'nav_msgs/Odometry'}};
bagselect4 = select(bag, selectOptions{:})
% 读取选择的消息数据
msgs = readMessages(bagselect3);
% 查看消息规模或长度
size(msgs)
% 按时间序列提取消息数据
ts = timeseries(bagselect3, 'Pose.Pose.Position.X', 'Twist.Twist.Angular.Z')
% 访问消息序列中的数据('Data'属性)
ts.Data
% 消息数据可视化
plot(ts, 'LineWidth', 3)
参考链接:https://www.ncnynl.com/archives/201909/3295.html
10. rosrate的使用
% 创建一个Rate对象,使您能够以固定的频率执行循环DesiredRate。时间源链接到全局ROS节点的时间源,这需要您使用将MATLAB连接到ROS网络rosinit
rate = rosrate(desiredRate)
% 创建一个Rate对象,该对象基于链接到指定ROS节点的时间源以固定的速率运行循环 node
rate = ros.Rate(node,desiredRate)
案例1:
rosinit
% 1 Hz
r = rosrate(1);
reset(r)
for i = 1:10
time = r.TotalElapsedTime;
fprintf('Iteration: %d - Time Elapsed: %f\n',i,time)
waitfor(r);
end
rosshutdown
案例2:
rosinit
node = ros.Node('/testTime');
r = ros.Rate(node,20);
reset(r)
for i = 1:30
% User code goes here.
waitfor(r);
end
rosshutdown
在Simulink中的使用参考工具箱自带案例robotROSFeedbackControlExample
 参考链接:https://ww2.mathworks.cn/help/ros/ref/rosrate.html
参考链接:https://ww2.mathworks.cn/help/ros/ref/rosrate.html




