教程演示环境为Windows+ROS2,过程和方法同样适合MacOS和Linux。 ros2的常用命令如下所示: ……继续阅读 » 5年前 (2021-04-26) 1924浏览 0评论1950个赞
前序:ROS 2| 节点 -nodes- ……继续阅读 » 5年前 (2021-04-26) 2682浏览 0评论574个赞
前序:ROS 2| 主题 -topics- <……继续阅读 » 5年前 (2021-04-26) 2069浏览 0评论2203个赞
前序:ROS 2| 服务 -services- 本节详细介……继续阅读 » 5年前 (2021-04-26) 3134浏览 0评论405个赞
前序:ROS 2 | 参数-parameters- 本节详……继续阅读 » 5年前 (2021-04-26) 3385浏览 0评论1740个赞
前序:ROS 2 | 行动-actions- 啥,开了十几个窗口,机器人还没有动起来…… 是时候了解一下launch文件啦……继续阅读 » 5年前 (2021-04-26) 3033浏览 0评论1458个赞
前序:ROS 2 | 启动-launch- ROS 2工具……继续阅读 » 5年前 (2021-04-26) 2604浏览 0评论1577个赞
测试和调试环境:Ubuntu 18.04.2 LTSgym-gazebo支持ROS Melodic(1.0),gym-gazebo2支持ROS Crystal(2.0) htt……继续阅读 » 5年前 (2021-04-26) 3374浏览 0评论2094个赞
初学者(入门级)教程是分步说明ROS2使用的资料汇总,目标向初学者介绍ROS 2。建议按顺序学习这些教程,从“普通用户”课程过渡到“开发人员”课程,获取ROS 2的基本知识。……继续阅读 » 5年前 (2021-04-26) 2348浏览 0评论609个赞
初学者(入门级)教程是分步说明ROS2使用的资料汇总,目标向初学者介绍ROS 2。建议按顺序学习这些教程,从“普通用户”课程过渡到“开发人员”课程,获取ROS 2的基本知识。……继续阅读 » 5年前 (2021-04-26) 1763浏览 0评论2473个赞
相关资料来源于教育部公布的2016,2017,2018,2019年度普通高等院校本科专业备案或审批结果的通知 (2019年4月最新更新,机器人……继续阅读 » 5年前 (2021-04-26) 2977浏览 0评论2679个赞
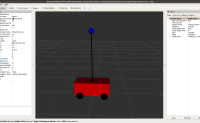
本文为使用ROS 2和Gazebo9搭建仿真机器人详细指南。 ……继续阅读 » 5年前 (2021-04-26) 1956浏览 0评论1257个赞
上一篇,已经在Gazebo 9中放入了一个支持ROS 2的仿真机器人,具体参考:使用机器人操作系统ROS 2和仿真软件Gazeb……继续阅读 » 5年前 (2021-04-26) 1727浏览 0评论2031个赞
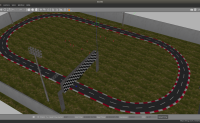
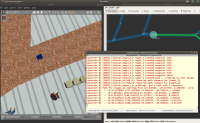
在完成教程(一)搭建机器人和(二)命令遥控可视化后,将仿真机器人用于更为逼真的环境,可以测试如……继续阅读 » 5年前 (2021-04-26) 3375浏览 0评论2618个赞
目标跟踪可以使用激光或视觉传感器,本节开始只提供思路,无教程,供有兴趣的朋友自主实践。激光测距视觉识别融合技术……继续阅读 » 5年前 (2021-04-26) 1701浏览 0评论2712个赞
在第三个和第四个案例中,我们依然只使用了一个机器人,毕竟室内环境比较小,为了增加趣味性和竞技效果,通常环境中可以有多个机器人要么竞争或协作完成任务,本实践选用如下场景(aws_bookstore): ……继续阅读 » 5年前 (2021-04-26) 2616浏览 0评论2100个赞
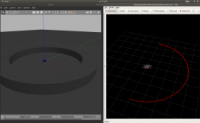
二维激光雷达是室内机器人最常用的距离传感器之一。 结合ROS暑期学校趣味竞赛案例,思考完成如下算法:读取环境基本特征识别特征给出一些关键值……继续阅读 » 5年前 (2021-04-26) 2514浏览 0评论983个赞
在ROS2课程中已经学过并掌握了一个基本的发布器和订阅器(C++),官网的教程全部掌握大致需要20分钟吧。 这过程包括:创建一个功能包编程实现一个发布节点……继续阅读 » 5年前 (2021-04-26) 2544浏览 0评论2098个赞
ROS2在基本概念上与ROS1相似,但是实现上差别较大,比如编程规范等。上一节是主题实战,有兴趣可以编写代码实现机器人速度发布和坐标订阅。……继续阅读 » 5年前 (2021-04-26) 1799浏览 0评论1042个赞
行动(action)比服务更为灵活和复杂。在给出行动具体说明之前,先简要复习一下:主题-服务-行动: ……继续阅读 » 5年前 (2021-04-26) 3075浏览 0评论1184个赞
最常见的移动机器人模型,差速,麦克纳姆轮的全向,阿克曼车式等。 ……继续阅读 » 5年前 (2021-04-26) 2259浏览 0评论2398个赞
……继续阅读 » 5年前 (2021-04-26) 2728浏览 0评论2895个赞
TF坐标变换基础 机器人建模和控制必须掌握坐标系和坐标变换等基础知识。机器人在空间中运动主要有两种形式: 平移和旋转 也就是线速度和角速度……继续阅读 » 5年前 (2021-04-26) 2660浏览 0评论1300个赞
ROS2的相关课程第一次开设的时间是在2017年的“智能机器人技术综合实训课程说明”(2017-2018-1学期)。当时以一个专题的形式进行简要介绍,2018年扩展了安装、基础、导航等内容(2018-2019-1学期)。The ROS2 course was first held……继续阅读 » 5年前 (2021-04-26) 2591浏览 0评论2800个赞
是时候放下ROS1,开启ROS2的旅程了。It’s time to put down ROS1 and start the journey of ROS2. ROS2官方在线文档链接 ROS2 official online documentation:https:……继续阅读 » 5年前 (2021-04-26) 1682浏览 0评论1319个赞
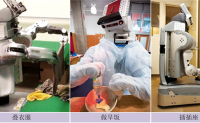
这里要偷懒了,都是已经发过的博文,在此列一下。Because these are blogs that have been published before, so just list them here. 桌面机器人:Desktop robot: Cozmo+ROS2:http……继续阅读 » 5年前 (2021-04-26) 1891浏览 0评论2062个赞
如果不了解ROS 2,推荐先体验一下吧,具体教程:机器人操作系统二(ROS2)- 启程 Departure ROS 2项目的目标是继承ROS 1的优点并改进不合……继续阅读 » 5年前 (2021-04-26) 3704浏览 0评论450个赞
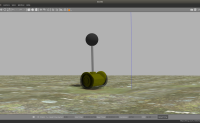
倒立摆是自动控制原理或现代控制理论等经典分析案例,博客有数篇博文针对这样案例给出题目和分析: ……继续阅读 » 5年前 (2021-04-26) 2349浏览 0评论1954个赞
这篇教程简要说明,在CoppeliaSim仿真环境中,使用ROS2接口,如果是ROS 2 Dashing,直接使用安装包中的compiledRosPlugins文件夹下的libsimExtROS2Interface.so。 ……继续阅读 » 5年前 (2021-04-26) 2029浏览 0评论418个赞
看最新动态,ROS1基本稳定更新维护,ROS2研发进度超快。 现有的ROS1功能包几乎涵盖了所有主流机器人和所有主流机器人学算法,同时这些大部分开源。 未来主流技术主要有如下类别: ……继续阅读 » 5年前 (2021-04-26) 2957浏览 0评论175个赞
之前,上过机器人或者单片机或者计算机或者控制的相关课程,急需一款适用于多课程的融合性机器人。 自己搭建机器人如下: ……继续阅读 » 5年前 (2021-04-26) 2628浏览 0评论1298个赞
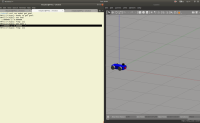
之前,现代控制理论,研究过一些倒立摆和自平衡小车,现在用ROS+Gazebo环境尝试一下。 ROS自平衡机器人仿真(机器人操作系统+现代控制理论融合案例) 找了一些案例都是……继续阅读 » 5年前 (2021-04-26) 1913浏览 0评论236个赞
在库中安装如下: ……继续阅读 » 5年前 (2021-04-26) 2130浏览 0评论2388个赞
在阅读本文之前,推荐阅读前篇ROS机器人TF基础和全部资料文档: TF基础:https://blog.csdn.net……继续阅读 » 5年前 (2021-04-26) 3066浏览 0评论563个赞
什么是SDCC? SDCC是可重定目标的,优化的标准C(ANSI C89,ISO C99,ISO C11)编译器套件,针对的是基于Intel MCS51……继续阅读 » 5年前 (2021-04-26) 2806浏览 0评论845个赞
简介 使用机器人操作系统ROS2和机器人中间件框架系统RMF进行多机器人系统集成,高层规划及其应用等。……继续阅读 » 5年前 (2021-04-26) 3075浏览 0评论2970个赞
学习ROS2机器人操作系统第一步要做什么呢?下载最新的官方文档到本地: 在github搜索ros2_documentation,使用git或者浏览器下载均可。 ……继续阅读 » 5年前 (2021-04-26) 1483浏览 0评论896个赞
本文作者:zhangrelay 英文视频教程Foxy: https://www.bilibili.com/video/bv1sD4y1……继续阅读 » 5年前 (2021-04-26) 2772浏览 0评论752个赞
掌握ROS2内置工具可以更高效的学习和使用其开发机器人软件程序,英文视频如下: https://www.bilibili.com/video/bv1Jg4y1v7vn 本节主要介绍以下阅读自述文件和代码常用的文本工具,提高学习和代码……继续阅读 » 5年前 (2021-04-26) 2575浏览 0评论287个赞
工区/工作区/工作空间(workspace简写为ws)是机器人操作系统核心概念之一。 工作空间是包含ROS 2软件的文件夹。在使用ROS 2之前,必须在正在使用的终端中配置ROS 2工作区(包括系统和局……继续阅读 » 5年前 (2021-04-26) 3433浏览 0评论1811个赞
ROS Noetic Ninjemys是ROS1最具里程碑式的版本!为什么呢? ……继续阅读 » 5年前 (2021-04-26) 2871浏览 0评论2043个赞
目前最主流的机器人操作系统为ROS1+ROS2,已成业界共识,如果没有购买机器人硬件又想学习机器人相关知识,那么一款仿真软件必不可少,软件分为免费和付费,下面将详细介绍。 每个人心中最好的机器人仿真软件标准不同,此文只做汇总不做评论,不……继续阅读 » 5年前 (2021-04-26) 3186浏览 0评论1886个赞
“Spot “机器人,此前被称为 “SpotMini”,是波士顿动力公司开发的一款四条腿的类似狗的机器人。 详细介绍的短视频在文末,如需简要了解,不必观看视频,个人一直觉得视频的时间成本很高,流量成本很高,制作成本也很高,这三高是相对于图文博客而言。……继续阅读 » 5年前 (2021-04-26) 3281浏览 0评论1825个赞