提前说说 博主是用寄存器写的驱动 历时两周,总算把小车弄好了,总体上来说做的太慢了。自己在32的学习中还不够仔细深入,只是浅面的学习,当真正做一个项目时,暴露的问题就太多了。这次在小车的制作的过程中,遇到了各种各样……继续阅读 » 5年前 (2021-04-26) 2617浏览 0评论2806个赞
Intel杯比赛结束已有两个月,我们这些实验室的中坚力量也该退休了,但还是要遵从实验室的传帮带学习模式,所以这几天要开始带一下学弟学妹们了。 那么学习ros最开始的就是ros操作系统的安装了,第一篇博文就从ros安装好了。 ……继续阅读 » 5年前 (2021-04-26) 2307浏览 0评论100个赞
这一个月来 距离实验室纳新后,已经过去一个月左右了。听取了学长的建议,这段时间也一直在搞Arduino这个软件,还算不错的认识了这个开源软件。(自我认为) 但是现在的依旧是一个小萌新,不说在软件代码的掌握程度,现在连有……继续阅读 » 5年前 (2021-04-26) 2230浏览 0评论1066个赞
由于学校这几天在开运动会,所以刚好有空闲的时间来好好琢磨这些原件以及认认真真完成这几篇博客。。。。 所以,这几天就好好研究这些电子元件。 那怎么具体研究呢,我想大概可以从这几个方面入手。 1.元件的介绍……继续阅读 » 5年前 (2021-04-26) 2304浏览 0评论1780个赞
今天继续来介绍这些电子元件。 4.LM2596S DC-DC降压电源模块 介绍:一块降低调整电压的元件 &n……继续阅读 » 5年前 (2021-04-26) 3385浏览 0评论841个赞
到今天为止,智能小车的三种功能也算全部完成了。(做蓝牙模块异常的顺利)接下来就是焊接矩阵键盘,将这三种功能合并在一块了。可能还会需要一段时间,包括矩阵键盘的焊接,代码的规整,所有硬件的加入,功能排障以及优化。 做小车应该是学嵌入式的一个最基本的项目,就因为是第一个,……继续阅读 » 5年前 (2021-04-26) 1491浏览 0评论105个赞
这几天在家闲着也是闲着,学东西,更博客,提升点能力吧。本篇针对的是kinetic版本的安装,其实都大同小异,有区别的地方也不大。 一.打开软件更新,把下列该勾的选项都一沟 ……继续阅读 » 5年前 (2021-04-26) 3278浏览 0评论2243个赞
ROS是什么? ROS=通信机制+开发工具+应用功能+生态系统 节点(Node)–执行单元 执行具体任务的进程、独立运行的可执行文件; 不同节点可使用不同的编程语言,可分……继续阅读 » 5年前 (2021-04-26) 2353浏览 0评论2869个赞
以小海龟为例启动ROS Master ……继续阅读 » 5年前 (2021-04-26) 2299浏览 0评论1783个赞
提前说说 五一小长假的最后一天,正式开始设计篇章。有种无从下笔的感觉,担心自己的博客可能会误导别人或者没有表达清楚自己的意思。所以认真观看博客的朋友如果发现有哪些地方不对劲的,欢迎与我讨论,也顺便让我不断不断修改。 接下来,就开始软件……继续阅读 » 5年前 (2021-04-26) 2873浏览 0评论2737个赞
工作空间 工作空间(workspace)是一个存放工程开发相关文件的文件夹 src:代码空间(Source Space)build: 编译空间(Build Space……继续阅读 » 5年前 (2021-04-26) 2478浏览 0评论2977个赞
实现在海龟仿真器下通过程序控制从而达到海龟的移动 1.创建功能包 和上篇博客创建相类似,在src文件下建立功能包 ……继续阅读 » 5年前 (2021-04-26) 2800浏览 0评论2083个赞
实现实时了解在海龟仿真器下海龟的位置信息 1.创建功能包 在上一篇博客创建的功能包下开发,所以就不……继续阅读 » 5年前 (2021-04-26) 2099浏览 0评论2887个赞
上回接寻迹功能后,这次来介绍超声波避障功能。 我们将超声波固定在舵机上,再通过对舵机的控制来实现超声波的转向。 超声波避障功能 示……继续阅读 » 5年前 (2021-04-26) 2671浏览 0评论631个赞
上回书说到,小车的超声波避障功能基本完成。那么本篇就来介绍最后一个功能,蓝牙智能控制功能。 废话不多说,来吧。 蓝牙控制功能 最令……继续阅读 » 5年前 (2021-04-26) 3326浏览 0评论1407个赞
……继续阅读 » 5年前 (2021-04-26) 2059浏览 0评论2886个赞
&nb……继续阅读 » 5年前 (2021-04-26) 3008浏览 0评论1848个赞
Client客户端向Server发送请求在海龟仿真器下创建一个新的海龟 1.创建功能包 cd /catkin_ws……继续阅读 » 5年前 (2021-04-26) 2579浏览 0评论1885个赞
在海龟仿真器下输入按键,通过服务端接收数据,并把数据发送给海龟仿真器1.创建功能包 在上一篇博客创建的功能包下开发,所以就不用创建了 然后在你创建的lear……继续阅读 » 5年前 (2021-04-26) 2362浏览 0评论704个赞
创建一个request,里面包含学生的年龄性别姓名,发送给服务端,服务端再反馈response 如何自定义服务数据 定义srv文件在package.xml中添加功能包……继续阅读 » 5年前 (2021-04-26) 2349浏览 0评论794个赞
参数模型 ……继续阅读 » 5年前 (2021-04-26) 3231浏览 0评论2743个赞
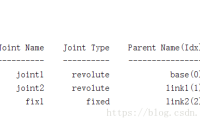
机器人中的坐标变换 ……继续阅读 » 5年前 (2021-04-26) 2632浏览 0评论2404个赞
好久不见朋友们,首先祝大家新年好呀!新的一年,祝大家牛年大吉,万事如意,bug少点,笑容多点!!! ……继续阅读 » 5年前 (2021-04-26) 2664浏览 0评论2136个赞
1.创建功能包 cd /catkin_ws/srccatkin_create_pkg learning_tf roscpp rospy tf t……继续阅读 » 5年前 (2021-04-26) 1761浏览 0评论887个赞
Launch文件:通过XML文件实现多节点的配置和启动(可自动启动ROS Master) ……继续阅读 » 5年前 (2021-04-26) 3151浏览 0评论939个赞
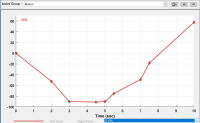
QT rqt_console 收集日志信息,方便做筛选,调试 ……继续阅读 » 5年前 (2021-04-26) 2790浏览 0评论606个赞
前几日有学弟问我,ros如何跟下位机通信呢? ……继续阅读 » 5年前 (2021-04-26) 2915浏览 0评论958个赞
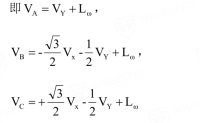
一个月不见,甚是想念,又和大家见面了,今天主要想和大家聊聊全向轮底盘运动。 首先先介绍一下什么是全向轮吧。全向轮是海丹等人的一款专利产品。全向轮包括轮毂和从动轮,该轮毂的外圆周处均匀开设有3个或3个以上的轮毂齿,每两个轮毂齿之间装设有一从动轮,该从动轮的径向方向……继续阅读 » 5年前 (2021-04-26) 2589浏览 0评论2723个赞