借助ROS的工具箱让turtlebot在gazebo中运行起来. Part 1.1: 让turtlebot跑起来  ……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1878浏览 0评论2974个赞
背景: 有一些状态需要实时监控,因此需要新建一个线程来处理此事,为了方便维护,线程的调用函数使用线程创建所在类的类方法。 解决方案: 通过线程创建函数pthread_create……继续阅读 » bbtang5568 5年前 (2021-04-26) 2854浏览 0评论2242个赞
上一篇博客为了实现延时特定时间(4ms)并在这段时间内产生PWM波形,方法是通过计算PWM的单次循环时间(PWM的周期),然后计算出循环次数,使用计数器计数,每次循环判断计数器的值是否等于循环次数。这种方法比较简单,对于不熟悉PRU 的我来说比较好用,对于只改变占空比不改变周期,……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3022浏览 0评论2421个赞
目录 前言电感排布方案舵机算法修正分段式PD算法……继续阅读 » Carry_qing 5年前 (2021-04-26) 2464浏览 0评论1592个赞
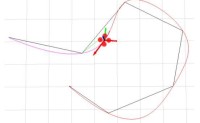
一、复合摆线轨迹 在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自己给蹬倒了?这时候就需要一……继续阅读 » 我是。 5年前 (2021-04-26) 3380浏览 0评论1007个赞
1 创建一个package catkin_create_pkg myurdf joint_state_controller robot_state_publ……继续阅读 » bbtang5568 5年前 (2021-04-26) 1938浏览 0评论2739个赞
使用xrdp远程连接树莓派Ubuntu mate系统 1) 安装xrdp sudo apt-get install xrdp……继续阅读 » 十啵 5年前 (2021-04-26) 1910浏览 0评论1703个赞
仅供个人学习记录 前言 DH法一般用一次就丢,然后后面再需要用的时候就会忘,所以本文整理了DH建模法,方便需要使用的时候进行参考。这里……继续阅读 » chuchu 5年前 (2021-04-26) 3299浏览 0评论642个赞
一、问题描述 如右图所示的三自由度机械臂,关节1和关节2相互垂直,关节2和关节3相互平行。如图所示,所有关节均处于初始状态。 要求: (1) 定义并标注出各关节的正方向; (2) 定义机器人基坐标系{0}及连杆坐标系{1},{2},{……继续阅读 » 挽风 5年前 (2021-04-26) 2996浏览 0评论2835个赞
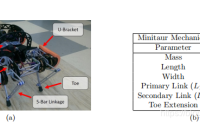
文章目录 介绍minitaur urdf解析base_chassis_linkchas……继续阅读 » 我是。 5年前 (2021-04-26) 3679浏览 0评论2310个赞
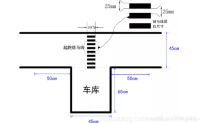
目录 车库元素一览入车库20cm摄像头拍下的车库图起跑线的识……继续阅读 » LeviKing98 5年前 (2021-04-26) 2267浏览 0评论321个赞
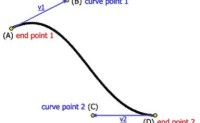
本篇将讲解MiniCheetah中所使用的的足端轨迹方程-贝塞尔曲线方程 一、贝塞尔曲线 贝塞尔曲线就是这样的一条曲线,它是依据四个位置任意的点坐标绘制出的一条光滑……继续阅读 » 我是。 5年前 (2021-04-26) 2964浏览 0评论2633个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2602浏览 0评论209个赞
写在前面我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2377浏览 0评论1308个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2080浏览 0评论2089个赞
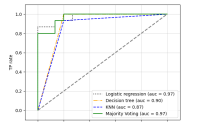
目录 一、认识集成学习 二、基于多数票机制的集成分类器实现 1、多数票机制原理 2、构建多数票分类器 3、多数票分类器实际应用 4、模型评估 三、套袋法(Bagging) 1、葡萄酒数据集样本分类 2、决策区域结果 四、自适应增强法(Adaboo……继续阅读 » Charzous 5年前 (2021-04-26) 3433浏览 0评论2825个赞
能力强的大佬可以直接看原文《A new geometric notation for open and close-loop robots》 另外……继续阅读 » chuchu 5年前 (2021-04-26) 2811浏览 0评论1244个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2366浏览 0评论489个赞
文章目录 一、结构参数二、腿部运动空间 随着人类环境中对机器人交互的需求不断增长,动态四足机器人的……继续阅读 » 我是。 5年前 (2021-04-26) 2994浏览 0评论1867个赞
参考:http://wiki.ros.org/actionlib/DetailedDescription ……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 1880浏览 0评论1103个赞
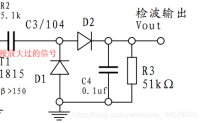
上一篇:恩智浦智能车四轮组– 1.电磁检测方案、运放选型 检波方……继续阅读 » Doee hc 5年前 (2021-04-26) 2169浏览 0评论1439个赞
低成本3D空间导航/测绘机器人——从零开始……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2093浏览 0评论2583个赞
写在前面 在上一节中我们讲到了测绘小车的基本架构。今天我们来一……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2135浏览 0评论724个赞
前言 上一篇详细介绍了模型预测控制的算法原理,以及其在多旋翼无人……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2406浏览 0评论1650个赞
目录透视变换的一些尝试原理变换的可行性变换的过程……继续阅读 » LeviKing98 5年前 (2021-04-26) 3070浏览 0评论2475个赞
魔方机器人(二) 颜色识别 今天,就让我们来看看魔方的颜色识别是如何做到的。做图像处理的话我们可以用OpenCV(用到了颜色空间的转换RGB转HSV以及ROI区域提取),全称为Open Source Computer Vision Library,……继续阅读 » Yang1024skr 5年前 (2021-04-26) 2084浏览 0评论618个赞
比如运行相机节点时出现这个问题而不能显示rgb图像 ……继续阅读 » 十啵 5年前 (2021-04-26) 2411浏览 0评论1406个赞
简要 之所以要单独测试一下STC8的ADC,主要有两个问题。 STC8手册里的ADC输入阻抗极低,需要实测是否影响正常使用。ADC的测量电压范围受Vref影响,0……继续阅读 » Doee hc 5年前 (2021-04-26) 3461浏览 0评论2601个赞
每个PRU都连接着一个OCP主口,它允许访问linux主机设备对应的内存地址。此功能允许PRU控制通用GPIO的输入和输出状态。PRU可访问Linux主机内存,但是访问速度要慢上好几倍,因为内存访问需要路由到外部的PRU-ICSS,在通过PRU-ICSS接口从/OCP从口接收返回……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2056浏览 0评论1568个赞
写在前面 上一小节我们讲到了机器人的轮胎(编码器)驱动,本节我们来介绍: 机器人上舵机的工作原理,硬件……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2348浏览 0评论1369个赞
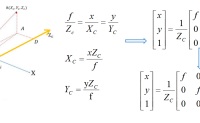
机器人中的坐标变换 ……继续阅读 » nidie508 5年前 (2021-04-26) 2703浏览 0评论1595个赞
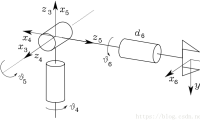
如图1所示的球形手腕(三个关节的轴线相交于一点)是常用的机械臂结构,我们希望在已知坐标系3至坐标系6的旋转矩阵的条件下求解3个关节值……继续阅读 » gpeng832 5年前 (2021-04-26) 1666浏览 0评论2480个赞
第一步:TX2安装ROS kinetic http://www.ncnynl.com/archives/201706/1750.html 第二步:安装激光雷达驱动(测试过rplidar、F4)……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2696浏览 0评论2389个赞
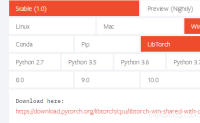
之前一直用Pytorch做的网络训练,最近想看看训练出来的模型在C++上的表现(毕竟稍微注重效率的工程都用的C++写),因此花了点时间研究了一波。 因为PyTorch的Python版本和C++版本使用的文件描述有区别,因此需要先把Python版本训练的模型转换成To……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3438浏览 0评论230个赞
ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合,在很多应用场景下,节点可以运行在不同的计算平台上,通过Topic、Service进行通信。但是ROS中只允许存在一个Master,在多机系统中Master只……继续阅读 » 十啵 5年前 (2021-04-26) 2980浏览 0评论2435个赞
继上篇文章ROS: URDF自定义robot model —–解决WARN:No tf data. Actual error: Fixed Frame [base_link] does no……继续阅读 » bbtang5568 5年前 (2021-04-26) 2937浏览 0评论2937个赞
写在前面 2019浙江省的足球机器人小型组对抗赛是4V4的,然后目标就是……继续阅读 » better_coder 5年前 (2021-04-26) 2062浏览 0评论2651个赞
目录 1. 采样(sampling.py)2. 聚合(net.py)3. Grap……继续阅读 » 喵木木 5年前 (2021-04-26) 2567浏览 0评论1214个赞
前言 上篇中介绍了基于稀疏点云传感器的常用避障规划算法,由于实际工程中受限于不同产品的技术成熟度、成本的因素的原因,不得不采用低成本的单点测距传感器进行避障。然而,避障作为无人机自动飞行必不可少的功能,设计一个健壮的避障规划器显得尤为……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2445浏览 0评论2028个赞
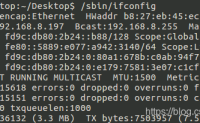
环境: (1)虚拟机本地端IP 192.168.10.30 (虚拟机需要通过桥接的形式与PC本地机连接, PC 机IP 192.168.10.21) (2)移动端 IP 192.168.10.11 1 配置本地环境变量 (1)打开 .bashrc <……继续阅读 » bbtang5568 5年前 (2021-04-26) 2749浏览 0评论2123个赞
我们已经在gazebo中实现了机器人的仿真,而且能够控制机器人的运动, 查看机器人所感知到的信息, 包括lasercan, 图像信息, 深度信息, 点云, 也包括没有提到的速度信息. 这里,我们建立用ROS navig……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1580浏览 0评论2126个赞
目录 1 软件包① 演示套装② 例子③ 性能测试工具……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 3187浏览 0评论2047个赞
本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 一、运动学 不考虑横向髋关节运动时,四足机器人的腿……继续阅读 » 我是。 5年前 (2021-04-26) 3570浏览 0评论985个赞
不久前PyTorch0.4.0官方支持了Windows,可谓是感天动地,于是乘比较空闲的时间搭搭环境,顺便做下记录。 ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3064浏览 0评论1012个赞
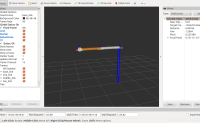
底层的电机控制已经基本完成,还需要解决的最后一个问题就是根据机械臂的运动,将机械臂的位姿状态信息发回到上位机的ROS,让RVIZ中的机械臂和现实中的机械臂保持一致。 目前没有反馈的信息发回到上位机,所以每当点击 Update ,然后Plan and Execute之……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3057浏览 0评论176个赞




![ROS URDF(一):自定义robot model —–解决WARN:Fixed Frame [base_link] does not exist](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20181114012713868.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2JidGFuZzU1Njg=,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)


![[ros2学习]-Client Libraries – 写一个简单的发布和订阅(C++)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200403174740338.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl8zNjYyODc3OA==,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)







![[ros2学习]-Awesome Robot Operating System2](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200329153109520.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl8zNjYyODc3OA==,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)