前面的几篇文章我们简单介绍了ROS的一些基本操作和数据获取的实现。下面,我们将更深入地研究ROS的数据传递,因为这关系到能不能真正把ROS用于实际的工程项目中。 如果工程只用ROS搭建,那么是不需要用到命题所说的LCM的。但如果ROS只是……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3514浏览 0评论1595个赞
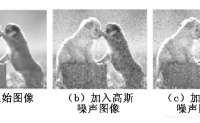
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2305浏览 0评论1245个赞
直立车涉及到的很……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2359浏览 0评论1887个赞
前言: 非常高兴能作为古月居的签约作者,以后将推出更有价值的文章,以供参考。 由于最近要参与一个等效为机械臂的项目,肯定需要做仿真,在加上好友青云同样想要学习机器人仿真软件,特此推出这个简单的教程,基于的环境是……继续阅读 » JameScottX 5年前 (2021-04-26) 3716浏览 0评论2928个赞
在开始之前,先送上本篇文章的彩蛋——我竟然在pybullet里放烟花!!! 声明:彩蛋与文章主要内容无关,纯粹图个开心。 ……继续阅读 » bug404 5年前 (2021-04-26) 2264浏览 0评论1592个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenC……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1692浏览 0评论1781个赞
在之前的move_group界面中,当点击plan and execute之后,move_group就会帮我们规划出一条通往指定位姿的轨迹,发布在follow_joint_trajectory上,通过rostopic echo /redwall_arm/fol……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 1885浏览 0评论1704个赞
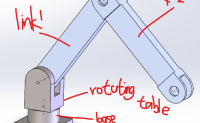
前言: 在进行机器人仿真时,建模往往是一项比较繁琐的工作,URDF(Unified Robot Description Format,统一机器人描述格式)作为一个很常用的机器人描述格式,能很方便的让我们进行机器人动力学和运……继续阅读 » chuchu 5年前 (2021-04-26) 3588浏览 0评论857个赞
上一篇文章我们介绍了怎么在ROS中应用LCM与外部进行通信。本篇我们回到ROS的内部,看看如何实现ROS节点间的内存共享,以实现更加快速的内部通信。 首先,我们需要清楚为什么要用内存共享? 答案是ROS提供的服务或者话题都是通过网络来实现……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1863浏览 0评论2378个赞
硬件环境:搭载ubuntu 16.04的笔记本,aubo_i5机械臂 软件环境:ros操作系统,aubo_i5驱动包 1,安装ros操作系统 下面链接前半部分为安装教程: https://blog.csd……继续阅读 » 光头明明 5年前 (2021-04-26) 2014浏览 0评论1764个赞
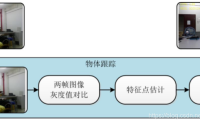
物体跟踪与物体识别有相似之处,同样使用特征点检测的方法,但侧重点并不相同。物体识别针对的物体可以是静态的或动态的,根据物体特征点建立的模型作为识别的数据依据;物体跟踪更强调对物体位置的准确定位,输入图像一般需要具有动态特性。 物体跟踪功能首先根据输入的……继续阅读 » 十啵 5年前 (2021-04-26) 2683浏览 0评论2540个赞
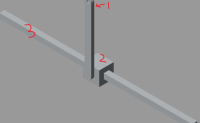
写在前面很高兴加入古月居这个大家庭,希望我的加入能给这个优秀的社区添砖加瓦~φ(≧ω≦*)♪ 回到正题,十六届智能车竞赛也是提上日程,这次卓大没有鸽我们,早早的就出了规则,今年的基础四轮组相较于去年也是有了一些变化,主要体现在以下……继续阅读 » better_coder 5年前 (2021-04-26) 2852浏览 0评论858个赞
实现cartographer建图与导航[1](2021.……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2266浏览 0评论1001个赞
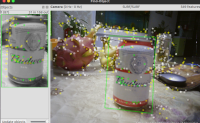
ROS的优点之一是有大量可以在应用程序中重用的软件包。在我们的例子中,想要实现一个物体识别和检测系统。而find_object_2d包(http://wiki.ros.org/find_object_2d)就是一个物体识别和检测的ROS包,它实现了SURF、SIFT……继续阅读 » 十啵 5年前 (2021-04-26) 3588浏览 0评论1838个赞
文章目录 0.前言1.URDF 转化成 rigidbody tree格式2.URD……继续阅读 » chuchu 5年前 (2021-04-26) 1811浏览 0评论561个赞
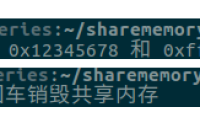
前篇文章介绍了如何实现最简单的节点间内存共享。但因为篇幅所限,并没有深入介绍怎么将其实用化。本篇我们将用之前专门介绍的……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3572浏览 0评论1811个赞
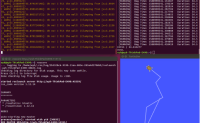
本节目标:搭建一套700行代码的激光SLAM。通过对ALOAM进行修改实验,确定对激光SLAM最核心的技巧,并接上节里程计,完成后端,构建较大场景(轨迹约2km)地图。 预期效果: ……继续阅读 » Eminbogen 5年前 (2021-04-26) 2083浏览 0评论1367个赞
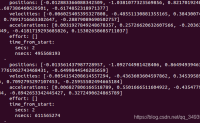
根据之前的配置,我们已经可以通过move_group发送出机械臂各关节运动的轨迹,并且通过三次样条插补的方法,赋予各个关节在特定角度时的速度和加速度,通过启动程序节点可以看到,本次运动规划使用了LBKPIECE算法,并且使用了4线程并行规划,规划时间为3.47875……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2078浏览 0评论1206个赞
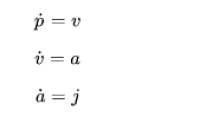
前言 上一章介绍了一种高效、实时的运动规划算法——JerkLimitedTrajectory(JLT)。 在给定起始状态与终止状态后,该算法能够快速地计算出一条符合三阶积分器动力学模型的运动轨迹。其适用于类似多旋翼无人机的对象,能够解……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2582浏览 0评论570个赞
1. Ubuntu 安装 ROS Kinetic 1.1Configure your Ubuntu repositories(配置您的Ubuntu存储库) &n……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2581浏览 0评论2568个赞
错位情况:  3136浏览 0评论1279个赞
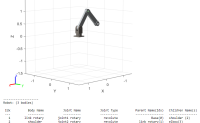
Matlab – Solidworks 机器人建模(4)—— 如何把SolidWorks模型导入到Matlab (Simscape模型) 1.说在前面 本文会介绍怎么直接把solidworks的模型转换成Matla……继续阅读 » chuchu 5年前 (2021-04-26) 2765浏览 0评论2579个赞
在ROS系统的构建中,很多问题是串行的,只能用一个节点进行串行计算。 这样导致的问题是CPU资源并没有完全用到,往往是程序延时很……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3093浏览 0评论1055个赞
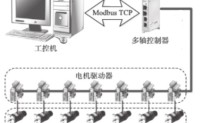
上位机的程序redwall_arm_server.cpp 功能是作为ROS的move_group客户端接收ROS规划的机械臂路点信息,进行三次样条插补获得各个关节或自由度的运动PVAT数据,然后通过TCP通信将处理好的数据发送给下位机的beagle……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3187浏览 0评论879个赞
由于在树莓派官网下载镜像真的是太慢了,这里给大家百度网盘下载地址: 链接:https://pan.baidu.com/s/1-Qq2DL9PhaIeEP0sJZrGqg 提取码:880u 按正常方式烧录开机就可以了~ 更新源:……继续阅读 » 十啵 5年前 (2021-04-26) 3285浏览 0评论468个赞
Matlab – Solidworks 机器人建模(5)—— 给模型添加摩擦力 0. 前言 建好模型并成功进行一次仿真之后,我们发现虽然模型可以像模像样的产生由重力带来的运动,但是也发现零件可以穿过其他零件,也叫“……继续阅读 » chuchu 5年前 (2021-04-26) 2814浏览 0评论2811个赞
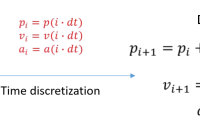
前言 上一篇中简述了模型预测控制在多旋翼飞行器运动规划中的应用。 本篇将针对采用线性MPC的多旋翼飞行器的运动规划方案进行详细推导。 系统模型的离散化 对于多旋翼飞行器这类三阶积分器模型……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2718浏览 0评论1218个赞
向高翔大佬学习,想写一套从零开始的激光SLAM博客记录一下自己学激光SLAM的过程,目前是研一学生,有大佬发现问题请告诉我,或者大家想看啥。 希望囊括slam里ros的基本使用,激光特征提取,地面提取,位姿计算,ceres对于优化的使用,gtsam因子图优化使用,i……继续阅读 » Eminbogen 5年前 (2021-04-26) 1794浏览 0评论766个赞
1.常用命令: rostopic rosservice rosnode rosparam rosmsg rossrv ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2455浏览 0评论565个赞
前期准备 安装相机驱动详细内容见博客:htt……继续阅读 » 骑士——永不止步 5年前 (2021-04-26) 3273浏览 0评论1298个赞
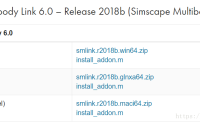
前言 本文适用对象: 没有机器人的Solidworks模型自己又懒得画的童鞋没有机器人URDF模型的童鞋 如果你在Matlab帮助里面搜索rigid……继续阅读 » chuchu 5年前 (2021-04-26) 2166浏览 0评论2329个赞
目前机器人行业最火的ROS,人工智能/机器学习方面相对较火的tensorflow,两者结合肯定是让机器人锦上添花,功能更加丰富完善。 正好在GitHub上看到了tensorflow的ROS功能包,验证功能包可行性之后,给大家分享一下。 先看一下效果: ……继续阅读 » 十啵 5年前 (2021-04-26) 2473浏览 0评论1048个赞
目录 1.flag2.资料准备3.环境搭建① 系统准备……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2324浏览 0评论584个赞
KDL(kinematic-Dynamic Library)项目是欧洲一些搞机器人的大牛做的一个开源的项目OROCOS(Open Robot Control Software)的一部分,,它产生和发展的历史可见官网(www.orocos.org),对于机器人学领域的同学们,如果想……继续阅读 » gpeng832 5年前 (2021-04-26) 2545浏览 0评论244个赞
文章目录 前言采样信号滤波什么是滤波常见的软件滤波办法……继续阅读 » Carry_qing 5年前 (2021-04-26) 2618浏览 0评论1166个赞
魔方机器人(一)还原算法 还原算法简介 我使用的是Thislethwaite还原算法.其简介如下:一般的魔方还原的解法……继续阅读 » Yang1024skr 5年前 (2021-04-26) 1965浏览 0评论745个赞
18cm三轮摄像头图像处理 前言比赛规则设备简述一、扫线方式(八领域)……继续阅读 » LeviKing98 5年前 (2021-04-26) 3620浏览 0评论1572个赞
目录 1. 前言2. 数据预处理——CoraData类的定义3. GCN层定义……继续阅读 » 喵木木 5年前 (2021-04-26) 2876浏览 0评论680个赞
参数模型 ……继续阅读 » nidie508 5年前 (2021-04-26) 2952浏览 0评论413个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2433浏览 0评论2116个赞
写在前面……继续阅读 » better_coder 5年前 (2021-04-26) 2325浏览 0评论2454个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 3181浏览 0评论2590个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2012浏览 0评论1116个赞
在ROS节点中解析并发送点云数据是非常基础的需求,下面我们将做简单的介绍。 点云数据发送 关于发送节点,只需要声明头文件:  ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2339浏览 0评论1224个赞
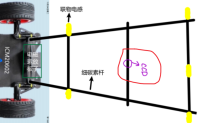
转载地址:https://blog.csdn.net/weixin_44578655/article/details/106147052 电磁检测电路方案、运……继续阅读 » Doee hc 5年前 (2021-04-26) 2918浏览 0评论1458个赞




![ROS联合webots实战案例(六)实现cartographer建图与导航[1]](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210126_69451.png&h=123&w=200&q=90&zc=1&ct=1)

![一起做激光SLAM[四]常见SLAM技巧使用效果对比,后端](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210125155059.png&h=123&w=200&q=90&zc=1&ct=1)





![一起做激光SLAM[一]ros里SLAM常用功能的熟悉](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210126155822.gif&h=123&w=200&q=90&zc=1&ct=1)



![[ros2学习]-资料准备与环境搭建](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210123113323.png&h=123&w=200&q=90&zc=1&ct=1)