更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,……继续阅读 » DiegoRobot 5年前 (2021-04-26) 3368浏览 0评论461个赞
视觉SLAM学习【6】—–基于python的SIFT和ORB特征点提取及匹配的对比探索目录 一、python终端安装需要的图像处理库1、……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2445浏览 0评论2402个赞
这是……继续阅读 » bug404 5年前 (2021-04-26) 2131浏览 0评论2409个赞
在webots中使用ROS控制小机器人 注意: 再学习……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2094浏览 0评论1280个赞
参考网址:https://industrial-training-……继续阅读 » 光头明明 5年前 (2021-04-26) 3201浏览 0评论167个赞
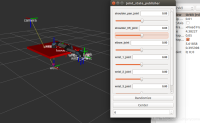
创建ROS包,包名redwall_arm ,通过自定义的消息,将手柄的数据发布 msg/ joycontrol.msg,内容如下,分别对应罗技手柄的按钮和遥杆轴。 i……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2367浏览 0评论1383个赞
视觉SLAM学习【7】—–基于ubuntu16.04的深度及彩色图像立体匹配,并生成深度和彩色3D点云目录 一、数据准备和库的安装及配置 <……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2211浏览 0评论656个赞
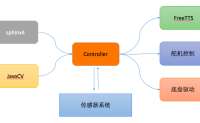
主控板主要提供智能数据分析,根据分析的结果通过串口发送控制命令给小车驱动板,小车驱动板根据控制命令控制小车的动作,主控板采用Java平台,集成相关领域的开源解决方案,软件系统主要包括如下: ……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2698浏览 0评论274个赞
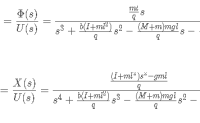
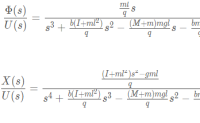
文章目录 0. 受控对象与设计要求0.1 受控对象……继续阅读 » chuchu 5年前 (2021-04-26) 2566浏览 0评论2383个赞
这一块自己参照以下网址配置 https://i……继续阅读 » 光头明明 5年前 (2021-04-26) 2390浏览 0评论1163个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2721浏览 0评论461个赞
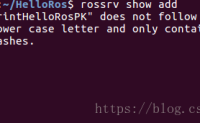
###### gazebo配合rviz 仿真机械臂 ####### 一旦机器人有超过6个关节,逆向运动学函数不唯一,可能存在多个解,逆向运动学很难,需要ROS中的逆向运动学包的使用,简化成矩阵的运算对于机械臂而言,需要的是能操作follow_joi……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3171浏览 0评论213个赞
笔者设备:北通 阿修罗 一共有14个按钮和4个线性杆 1. 使用外接手柄控制小机器人 ……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2224浏览 0评论973个赞
python人脸识别—–基于Ubuntu16.04的dlib+python3实现人脸识别及摄像头人脸检测目录 一、ski……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 3411浏览 0评论264个赞
文章目录 0. 受控对象与设计要求0.1 受控对象……继续阅读 » chuchu 5年前 (2021-04-26) 2712浏览 0评论264个赞
一,第十三届全国大学生智能汽车竞赛获奖名单……继续阅读 » 古月居官方 5年前 (2021-04-26) 3401浏览 0评论1694个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 3067浏览 0评论1830个赞
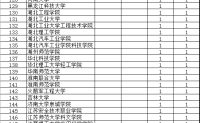
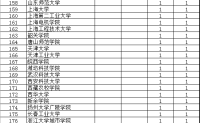
第十五届全国大学生智能汽车竞赛各分赛区国赛获奖信息1.东北赛区<……继续阅读 » 古月居官方 5年前 (2021-04-26) 2282浏览 0评论133个赞
Python人脸微笑识别2–卷积神经网络进行模型训练目录 ……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1979浏览 0评论527个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,diegorobot 业余时间完成的一款在线统计过程分析工具SPC,及SPC知识分享网站qdo……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2568浏览 0评论2614个赞
在上一篇博客中,我们介绍了怎么创建一个ROS的最小系统,该系统包括工作空间、包和一个存放在包中的节点,然后我们让该节点打印“Hello ROS”。 在这一篇博客中,我们将……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2362浏览 0评论694个赞
××××××××××××××××××××××××××××××××××××× 8.15号更新 新的github链接:https://github.com/harrycomeon/Project1-Apriltags-UR5 由于直接采用myrobot的效果并不好,所以……继续阅读 » 光头明明 5年前 (2021-04-26) 3316浏览 0评论2285个赞
文章目录 0. 受控对象与设计要求0.1 受控对象……继续阅读 » chuchu 5年前 (2021-04-26) 2643浏览 0评论1257个赞
在webots中使用激光雷达 注意: 再学习本系列教程时,应该已经安装过……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3053浏览 0评论2603个赞
首先说明一下,这里我们的摄像头和tag只是利用了他们的相对位姿,并没有按照实际模型那样布置摄像头和tag,但这并不影响我们观察整个系统的运行效果,布置如下: ……继续阅读 » 光头明明 5年前 (2021-04-26) 2931浏览 0评论2071个赞
导航功能包入门1 注意: 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2647浏览 0评论383个赞
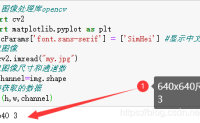
[Python图像处理]一 :Opencv-python的简介及环境搭建 一、为什么选择opencv-python1……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 3389浏览 0评论1773个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,diegorobot 业余时间完成的一款在线统计过程分析工具SPC,及SPC知识分享网站qdo……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2223浏览 0评论2674个赞
上一篇文章我们介绍了ros最小话题系统的制作,本篇将进一步介绍ROS的另一种节点间的交互形式—服务 首先,什么是服务? ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1835浏览 0评论2621个赞
1.什么是URDF? URDF全称(United Robotics Description Format)统一机器人描述格式,是一个XML语法框架下用来描述机器人的语言格式,URDF在ROS界很流行。我们可以 ……继续阅读 » chuchu 5年前 (2021-04-26) 3505浏览 0评论2482个赞
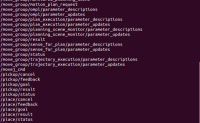
OMPL能做什么? 简单说,就是提供一个运动轨迹。给定一个机器人结构(假设有N个关节),给定一个目标(比如终端移到xyz),给定一个环境,那么OMPL会提供给你一个 轨迹,也就是一个完整的关节位置。沿着这个轨迹依次移动关节,就可以最终把终端移到xyz,当然,……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3639浏览 0评论1502个赞
导航功能包入门2 注意: 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 1991浏览 0评论2396个赞
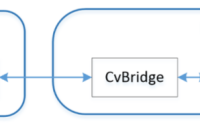
在机器人系统中,视觉是非常重要的一部分(人的眼睛获取信息占全部信息的78%,机器人可以类比下)。因此,用前面四篇文章打下些许基础后,本人便迫不及待的想学习怎么在ROS上用上OpenCV视觉库。 ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3473浏览 0评论2476个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 3062浏览 0评论1963个赞
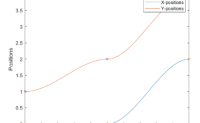
仿真平台:Matlab 2019b 实时编辑器(旧的版本好像没有这几个路径规划函数) 机械臂路径点跟踪有几个基本方法:三阶多项式拟合,五阶多项式拟合以及抛物线拟合(理论来自于《机器人学导论》作者:Jhon J.Craig,这里不再赘述) 原理都不难,编程难度应该也不……继续阅读 » chuchu 5年前 (2021-04-26) 3059浏览 0评论1139个赞
获取机器人URDF模型文件的途径通常有 自己写机器人制造商提供其机器人的URDF模型通过机械设计软件导出URDF文件 本节我们学习怎么自己写一个简单的URD……继续阅读 » chuchu 5年前 (2021-04-26) 2942浏览 0评论2701个赞
OpenCV库(Open Source Computer Vision Library)是一个基于BSD许可发行的跨平台开源计算机视觉库,可以运行在Linux、Windows和mac OS等操作系统上。OpenCV由一系列C函数和少量C++类构成,同时提供C++、Python、R……继续阅读 » 十啵 5年前 (2021-04-26) 2610浏览 0评论244个赞
本节目标:提取edge点和plane点与地面点并显示 预期效果: ……继续阅读 » Eminbogen 5年前 (2021-04-26) 2279浏览 0评论1339个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1811浏览 0评论2069个赞
上篇文章我们介绍了怎么用OpenCV打开图像并将图像数据发送出去, 这解决了一部分问题。但实际工程应用中,我们经常需要实时获取图像数据,因此仅仅读取本地的图片是不够的。本篇我们将研……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2505浏览 0评论1695个赞
1. 引言 ……继续阅读 » hitgavin 5年前 (2021-04-26) 3422浏览 0评论1760个赞
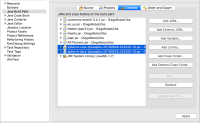
# 开始控制真实世界的机械臂 ####### 我们的目的是使用moveit控制真实的机械臂,而我们真正需要的action是Fol……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3264浏览 0评论2532个赞
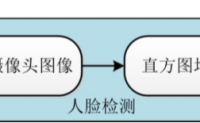
人脸识别需要在输入的图像中确定人脸(如果存在)的位置、大小和姿态,往往用于生物特征识别、视频监听、人机交互等应用中。2001年,Viola和Jones提出了基于Haar特征的级联分类器对象检测算法,并在2002年由Lienhart和Maydt进行改进,为快速、可靠的……继续阅读 » 十啵 5年前 (2021-04-26) 2866浏览 0评论2367个赞
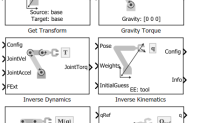
本文的讨论对象仅局限于刚体模型 Matlab建立机器人模型主要有两个方面(当然不排除有其他的,我只说我知道的): Rigidbody tree 坐标系模型Simsacpe 物理模型 ……继续阅读 » chuchu 5年前 (2021-04-26) 2613浏览 0评论2429个赞
本节目标:搭建一套400行代码的激光里程计。需要plane特征进行点面距离估计达到位姿优化效果,使用ceres优化,把地图和轨迹打在公屏上。这次目标就是水水地跑通一个最基础的lidar odometer。……继续阅读 » Eminbogen 5年前 (2021-04-26) 2640浏览 0评论1351个赞



















![一起做激光SLAM[二]提取特征点和地面点](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210120154606.gif&h=123&w=200&q=90&zc=1&ct=1)


![一起做激光SLAM[三]位姿估计,ceres优化,地图构图](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200801112537664.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3VubGltaXRlZGFp,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)