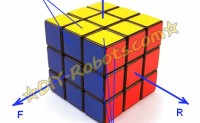
1.创建功能包 cd /catkin_ws/srccatkin_create_pkg learning_tf roscpp rospy tf t……继续阅读 » nidie508 5年前 (2021-04-26) 1753浏览 0评论1619个赞
上一篇文章:深度学习1—最简单的全连接神经网络 我们完成了一个三层(输入+隐含+输出)且每层都具有两个节点的全连接神经网络的原理分析和代码编写。本篇文章将进一步探讨如何把每层……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2655浏览 0评论942个赞
参考:http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber(python) 1 编写Publisher节点 &……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 3534浏览 0评论880个赞
目前训练强化学习智能体需要越来越多的数据和算力,分布式计算是加快训练过程的重要一环。Ray(RLlib)是由UC Berkeley’s RISE Lab在2017年发布,目前已经成为强化学习训……继续阅读 » bug404 5年前 (2021-04-26) 2726浏览 0评论2551个赞
前言: 机械手解魔方的快速方案,基本就是两只手成90度摆……继续阅读 » JameScottX 5年前 (2021-04-26) 2933浏览 0评论1787个赞
魔方机器人(基于OpenCV、Arduino) 简介 顾名思义,魔……继续阅读 » Yang1024skr 5年前 (2021-04-26) 1571浏览 0评论1172个赞
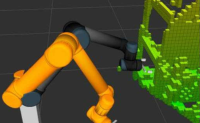
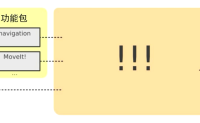
师兄和同门在做SLAM的时候,经常会用到的 octomap ,也就是八叉树地图。octomap相比于点云地图来说大大减小了地图的存储空间。既然octomap可以用于导航和避障,那么自然也可以导入moveit!,作为机械臂路径规划过程中的障碍物,方便机械臂和障碍物之间进行碰撞检测。……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2882浏览 0评论759个赞
……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2643浏览 0评论2652个赞
超参数的设置对强化学习算法的训练效果起着非常重要的作用,如果超参数没有调整好,可能非常好的网络结构和强化学习算法也发挥不出优势。超参数的调整是一项非常困难又略带玄学的工作,好在ray的tune能自动帮我们进行超参数的调整,找到最优的超参数。 下面我们通过例子来看一下tune的使用……继续阅读 » bug404 5年前 (2021-04-26) 2840浏览 0评论1972个赞
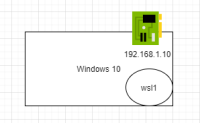
一、 鲁迅说过:“不能一口吃个胖子。” 这句话是有道理的。前段时间测试wsl2安装ROS引导ABB机器人,碰了钉子。今天网上搜了一下wsl的网络配置,发现用wsl要比wsl2简单很多。 WSL1 是共享宿主机的网络栈,即 WSL1 共享主机 IP,并没有自己独立的逻辑网卡,也即没……继续阅读 » 两钞票 5年前 (2021-04-26) 3202浏览 0评论1987个赞
Launch文件:通过XML文件实现多节点的配置和启动(可自动启动ROS Master) ……继续阅读 » nidie508 5年前 (2021-04-26) 2850浏览 0评论721个赞
ROS当中的关键组件: Launch文件TF坐标变换Qt工具箱Rv……继续阅读 » 小小何先生 5年前 (2021-04-26) 2728浏览 0评论2048个赞
整体框架 本系统的设计理念共分为三个层……继续阅读 » better_coder 5年前 (2021-04-26) 3109浏览 0评论2896个赞
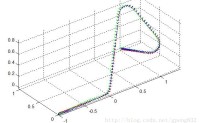
很多同学会把路径规划(Path Planning)和轨迹规划(Trajectory Planning)这两个概念混淆,路径规划只是表示了机械臂末端在操作空间中的几何信息,比如从工作台的一端(A点)沿直线移动到另一端(B点)。而轨迹规划则加上了时间律,比如它要完成的任务是从A点开始……继续阅读 » gpeng832 5年前 (2021-04-26) 1775浏览 0评论2771个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2205浏览 0评论2665个赞
Astra pro深度相机配置 我发现从github上clone下来的功能包并没有rviz文件 为了显示深度相机的点云图,这……继续阅读 » 十啵 5年前 (2021-04-26) 3598浏览 0评论1195个赞
ray的强大不仅在于他是分布式计算框架,更是因为有RLLib和tune的加持。tune的使用上一节我们已经讲了,这一节我们来看一下RLLib的使用。虽然后讲的rllib,但是真正训练的时候,还是tune使用的多,因为它调节超参数是很方便的,而rllib不具有自动调节超参数的能力。……继续阅读 » bug404 5年前 (2021-04-26) 4241浏览 0评论392个赞
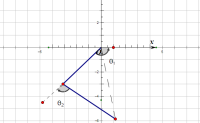
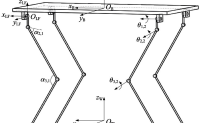
一、平面运动学建模 本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 不考虑横向髋关节运动时,四足机器人的腿部可以简化成二连杆机构 1、几何建模……继续阅读 » 我是。 5年前 (2021-04-26) 3133浏览 0评论1669个赞
launch文件:通过XML文件实现多节点的配置和启动(可自启动ROS Mater) launch文件语法 ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 3504浏览 0评论2032个赞
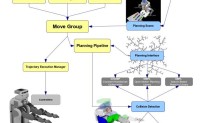
运动规划(Motion Planning):要让一个机器人实现运动规划,需要先将机器人抽象到构形空间(C-Space)。MoveIt就可以帮大家把这些工作给做了,只需提供机器人URDF模型,就可以调用几大运动规划库的规划算法(如OMPL,SBPL……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3493浏览 0评论1585个赞
我们继续上一篇文章pybullet杂谈 :使用深度学习拟合相机坐标系与世界坐标系坐标变换关系(一),在上一篇文章中,我们完成了物体世界坐标系和相机坐标系的坐标对应关系的数据,以及数据的存取……继续阅读 » bug404 5年前 (2021-04-26) 2287浏览 0评论2969个赞
根据零力矩点理论分析机器人行进过程的稳定条件,利用稳定裕度的概念,在支撑多边形中求取最优稳定点来规划零力矩点.可以为避免 walk步态中频繁调整躯干姿态导致的能耗和行进速度损失[1] 此外,“零力矩点”是判定仿人机器人动态稳定运动的……继续阅读 » 我是。 5年前 (2021-04-26) 2654浏览 0评论234个赞
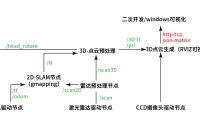
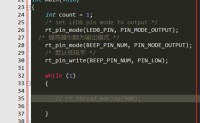
写在前面 上一小节我们完成了数据包的构建,并且实现了对基础硬件的控制。从这一小节开始,我们将进入基于ROS的上位机程序设计。本小节主要介绍了: 三维空间测绘机器人的ROS节点分布……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2821浏览 0评论1078个赞
上一篇文章:深度学习2—任意结点数的三层全连接神经网络 距离上篇文章过去了快四个月了,真是时光飞逝,之前因为要考博所以耽误了更新,谁知道考完博后之前落下的接近半个学期的工作是……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2916浏览 0评论2804个赞
源码: ……继续阅读 » bbtang5568 5年前 (2021-04-26) 3341浏览 0评论271个赞
文章目录① 背景② 前提③ 任务……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 3055浏览 0评论790个赞
本节目标:利用ICP进行闭环检测,完成闭环。 预期效果:通过闭环检测完成起止闭环,下图为加入闭环前后。 ……继续阅读 » Eminbogen 5年前 (2021-04-26) 3262浏览 0评论168个赞
ROS_ControlROS为开发者提供的机器人控制中间件。包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等。可以帮助机器人应用功能包快速落地,提高开……继续阅读 » 小小何先生 5年前 (2021-04-26) 2808浏览 0评论2453个赞
写在前面现在的裸机程序已经不能满足嵌入式机器人所需的代码结构要求了,因为一个嵌入式机器人的系统是非常庞大的,分别由感知算法,决策算法和控制算法等……继续阅读 » better_coder 5年前 (2021-04-26) 2416浏览 0评论1072个赞
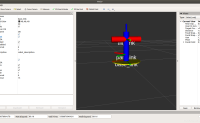
本节目标:学习gtsam与isam在二位位姿pose2和三维位姿pose3上的使用,并将isam用于位姿的因子图优化。 预期效果:将ICP匹配带来的瞬间位移变成对之前累积误差的消除。蓝色ICP无图优化,紫色ICP后进行图优化。 ……继续阅读 » Eminbogen 5年前 (2021-04-26) 1817浏览 0评论1687个赞
前言 ……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3593浏览 0评论173个赞
前言: 今年又去参加了余姚的第二届全国创意机器人大赛,当然还是主题二。今年限制了机器的体积及功率,所以没有出现去年那样的巨无霸。比赛我们队伍拿了一个全国一等……继续阅读 » JameScottX 5年前 (2021-04-26) 2912浏览 0评论2851个赞
mnist是在图像机器学习占据“Hello World”地位的库。下载地址如下:http://yann.lecun.com/exdb/mnist/ train-images-idx3-ubyte(训练集数据,存放训练图像的集合) train-labels-idx1-ubyte(训……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3292浏览 0评论246个赞
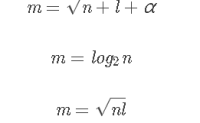
参数模型 ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2247浏览 0评论2973个赞
机械臂的逆动力学问题可以认为是:已知机械臂各个连杆的关节的运动(关节位移、关节速度和关节加速度),求产生这个加速度响应所需要的力/力矩。KDL提供了两个求解逆动力学的求解器,其中一个是牛顿欧拉法,这个方法是最简单和高效的方法。 牛顿欧拉法算法可以分为三个步骤: st……继续阅读 » gpeng832 5年前 (2021-04-26) 3327浏览 0评论1330个赞
目录十六届智能车基础四轮组路标:电感 or 摄像头?十六届智能车基础四轮组路标:普通赛道元素的电感信号感知……继续阅读 » better_coder 5年前 (2021-04-26) 1881浏览 0评论1322个赞
简介 随着人工智能技术的迅速发展,移动机器人导航在拥挤的行人环境中有许多重要的应用,如医院、商场和食堂。在这些人群密集的场景中,安……继续阅读 » 柯南404 5年前 (2021-04-26) 2664浏览 0评论311个赞
时间:2020年4月9日 对之前内容做补充,加入支撑相轨迹规划,并构造完整的的周期曲线 在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自己给蹬倒了?这时候就需要一个合……继续阅读 » 我是。 5年前 (2021-04-26) 2785浏览 0评论2383个赞
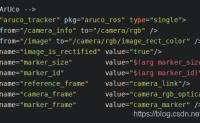
aruco是一种类似二维码的定位标记辅助工具,通过在环境中部署Markers,可以辅助机器人进行定位,弥补单一传感器的缺陷,纠正误差。在之前的手眼标定easy_handeye程序中,需要使用这个工具进行手眼标定。正好手上有realsense深度相机,就根据资料进行了简单的测试。如……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3472浏览 0评论773个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2401浏览 0评论2634个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2787浏览 0评论2107个赞
为了使创建的URDF机器人模型正确运动,必须给出robot_state_publisher 节点所需的sensor_msgs::JointState型topic:joint_states。可参见:……继续阅读 » bbtang5568 5年前 (2021-04-26) 3361浏览 0评论573个赞
前言 ……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3231浏览 0评论1056个赞
似然(likelihood)这个词其实和概率(probability)是差不多的意思,但是在统计里面,似然函数和概率函数却是两个不同的概念。 对于函数:……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2729浏览 0评论2011个赞
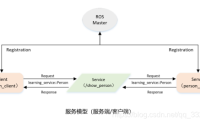
0 背景 我们使用ROS开发时,希望当机器人上电以后,会自动启动一些传感器的驱动文件,定位导航,建图所需要的文件,并能按照我们的设定实现一定的功能,比如相应客户端的命令,并按照客户端的指令来动作,或者开机以后,自动对所在的环境进行建图和导航等。我们……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 1662浏览 0评论2499个赞










![[ros2学习]-CLI Tools – 了解ROS 2参数(parameters)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/202004021658373.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl8zNjYyODc3OA==,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)
![一起做激光SLAM[五]ICP匹配用于闭环检测](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200914215344442.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3VubGltaXRlZGFp,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)
![一起做激光SLAM[六]isam于SLAM位姿因子图优化的使用](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200917122352251.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3VubGltaXRlZGFp,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)






![[ros2学习]-CLI Tools – 了解ROS 2动作(action)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210220193504.png&h=123&w=200&q=90&zc=1&ct=1)