低成本3D空间导航/测绘机器人——从零开始……继续阅读 » 5年前 (2021-04-26) 2391浏览 0评论1769个赞
写在前面 在上一节中我们讲到了测绘小车的基本架构。今天我们来一……继续阅读 » 5年前 (2021-04-26) 2741浏览 0评论2281个赞
写在前面 上一小节我们讲到了机器人的轮胎(编码器)驱动,本节我们来介绍: 机器人上舵机的工作原理,硬件……继续阅读 » 5年前 (2021-04-26) 2986浏览 0评论2155个赞
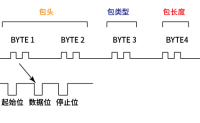
写在前面 上一小节我们介绍了机器人的舵机驱动与串口通讯的原理。到目前为止,我们已经完成了: 机器人编码器和轮胎的驱动机器人头部舵机的驱动< ……继续阅读 » 5年前 (2021-04-26) 2018浏览 0评论915个赞
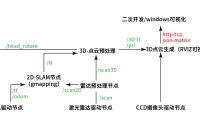
写在前面 上一小节我们完成了数据包的构建,并且实现了对基础硬件的控制。从这一小节开始,我们将进入基于ROS的上位机程序设计。本小节主要介绍了: 三维空间测绘机器人的ROS节点分布……继续阅读 » 5年前 (2021-04-26) 2601浏览 0评论1391个赞
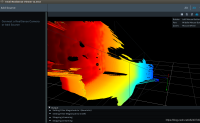
写在前面 上一节我们实现了基本的2D-SLAM导航包的使用。 本节我们将在2D-SLAM的基础上,通过手动遥控实现控制云台俯仰角来生成三维点云(如下图,视频还没上传可以在我朋友圈看)。 ……继续阅读 » 5年前 (2021-04-26) 3393浏览 0评论1796个赞
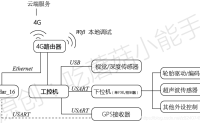
室外低速自动导航车的设计(1)——基础硬件配置 今天我们来开始做基于GPS和16线激光雷达的低速导航车项目。 因为不论做什么车,首先都要把硬件搭建起来,除了基础的机械机构(骨架和壳子)之外,基本的传感器,车轮的驱动器以及工控机都是要有的。 ……继续阅读 » 5年前 (2021-04-26) 2874浏览 0评论2837个赞
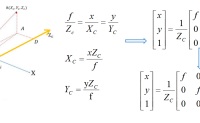
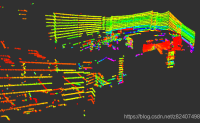
室外低速自动导航车的设计(2)——多线激光雷达的点云解析 我们在前面硬件系统的构建中通过网络接收到了多线激光雷达的原始数据,这些数据在空间中形成了一个个的点,每一个点都代表了某个物体表面的回波。我们采用的激光雷达是……继续阅读 » 5年前 (2021-04-26) 2817浏览 0评论1879个赞
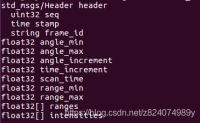
写在前面 上一节我们简单讨论了在生成点云的过程中的矩阵变换。如果大家看本章有点懵逼的话,不妨先看一下我上节写的内容。 我们本节将基于激光雷达与矩阵变换关系,将激光雷达的LaserScan数据转……继续阅读 » 5年前 (2021-04-26) 3528浏览 0评论702个赞
今天来学习一下英特尔D435深度传感器的相关内容: 首先,我们找到D435官网:https://www.intelrealsense.com/developers/ 我们打开一个终端,按照官网提示输入以下内容: 1)在软……继续阅读 » 5年前 (2021-04-26) 2238浏览 0评论2331个赞
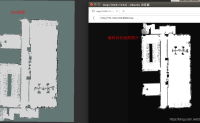
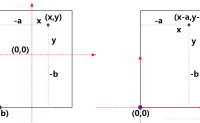
在很多商用机器人中都涉及到机器人与外部设备(比如APP)之间的交互。而在交互中,最为首要的就是地图与机器人位置的交互了。在这一个章节中,我们介绍一个机器人将内部的地图,机器人位置等数据与用户端进行同步的案例。 1. 实际场景与机器人(ROS)地图的对应关系……继续阅读 » 5年前 (2021-04-26) 1793浏览 0评论2960个赞
第4节我们说到ROS与APP之间的地图交互与坐标系变换,今天我们来实现一个与ROS地图对接的APP,实现以下功能: 1)机器人的ROS地图能够通过网络方式传输到APP上,同时APP上能显示机器人位置 2)使用者绘制APP中地图上的某个区域,这个点能在R……继续阅读 » 5年前 (2021-04-26) 1990浏览 0评论2539个赞
我们已经了解了ROS地图的特征。现在我们假设已知在地图上某个位置有一台机器人,我们要将ROS地图转换为图片,同时机器人在地图上的位置传输至外部用户终端;使用户终端能够实时显示机器人位置。 我们先从用户终端(Windo……继续阅读 » 5年前 (2021-04-26) 3076浏览 0评论2586个赞
在一台机器人中不可避免地会具有很多种传感器(雷达,视觉,深度…);在机器人的导航中对这些传感器的融合,并形成完整的导航策略是很关键的。对于一台室内/室外机器人来讲,传感器的融合主要分为两个方面:融合定位,使用GPS/IMU/里程计/视觉/……继续阅读 » 5年前 (2021-04-26) 2640浏览 0评论1069个赞
A*算法是一种Greedy算法,ROS中的navigation导航包中的global_planner中就能找到。今天,我们从头入手,自己移植并完成关于A*算法在ROS上的移植和实现。首先来说一下我们最后想实现的目的:我们……继续阅读 » 5年前 (2021-04-26) 3419浏览 0评论451个赞