PID控制算法是一个在工业控制应用中常见的反馈回路算法,它把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,从而使得整个系统更加准确而稳定。 PID控制算法由比例单元(Proportional)、积分单元(Integral)和微分单元(Deriv……继续阅读 » 5年前 (2021-04-26) 2749浏览 0评论1084个赞
1.roslaunch 命令 roslaunch 命令允许我们一次启动 launch 文件中定义的多个 ROS 节点,启动参数等在启动文件(launch 文件)中配置,并且如果系统之前没有启动 roscore,则 roslaunch……继续阅读 » 5年前 (2021-04-26) 2117浏览 0评论966个赞
环境: Ubuntu16.04 ROS kinetic C++ 1.新建ROS工作空间 mkdir -p PointCloundShow_ws/src……继续阅读 » 5年前 (2021-04-26) 2862浏览 0评论2593个赞
1.运行小海龟仿真工具 ……继续阅读 » 5年前 (2021-04-26) 1843浏览 0评论201个赞
创建功能包 $ cd ~/catkin_ws/src$ catkin_create_pkg learning_tf roscpp……继续阅读 » 5年前 (2021-04-26) 2396浏览 0评论875个赞
3D点云特征描述与提取是点云信息处理中最基础也是最关键的一部分,点云的识别。分割,重采样,配准曲面重建等处理大部分算法,都严重依赖特征描述与提取的结果。从尺度上来分,一般分为局部特征的描述和全局特征的描述,例如局……继续阅读 » 5年前 (2021-04-26) 2792浏览 0评论132个赞
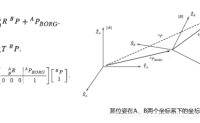
机器人中的坐标变换 ……继续阅读 » 5年前 (2021-04-26) 2781浏览 0评论1289个赞
1. Ubuntu 安装 ROS Kinetic 1.1Configure your Ubuntu repositories(配置您的Ubuntu存储库) &n……继续阅读 » 5年前 (2021-04-26) 2976浏览 0评论2424个赞
1.常用命令: rostopic rosservice rosnode rosparam rosmsg rossrv ……继续阅读 » 5年前 (2021-04-26) 1938浏览 0评论710个赞
以小海龟运动仿真为例: ……继续阅读 » 5年前 (2021-04-26) 3533浏览 0评论2022个赞
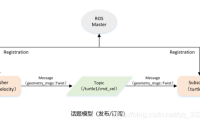
话题模型 ……继续阅读 » 5年前 (2021-04-26) 2016浏览 0评论921个赞
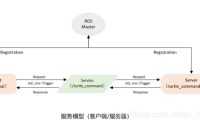
在ROS Master的管理之下有client和server两个节点,下面要实现的是server端,server端用来给海龟发送速度的指令,通过topic来发,service功能是以client端发布request控制server是不是要给海龟发速度指令,client端是海龟运动……继续阅读 » 5年前 (2021-04-26) 3100浏览 0评论1847个赞
……继续阅读 » 5年前 (2021-04-26) 2821浏览 0评论1603个赞
launch文件:通过XML文件实现多节点的配置和启动(可自启动ROS Mater) launch文件语法 ……继续阅读 » 5年前 (2021-04-26) 3535浏览 0评论351个赞
参数模型 ……继续阅读 » 5年前 (2021-04-26) 1473浏览 0评论214个赞
1.数据格式 在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud sensor_msgs::PointCloud2……继续阅读 » 5年前 (2021-04-26) 2318浏览 0评论371个赞
在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud ……继续阅读 » 5年前 (2021-04-26) 1437浏览 0评论1763个赞
1.pcl_tutorial官方给的模板 int main(int argc, char** argv){ pcl::PC……继续阅读 » 5年前 (2021-04-26) 2284浏览 0评论1638个赞