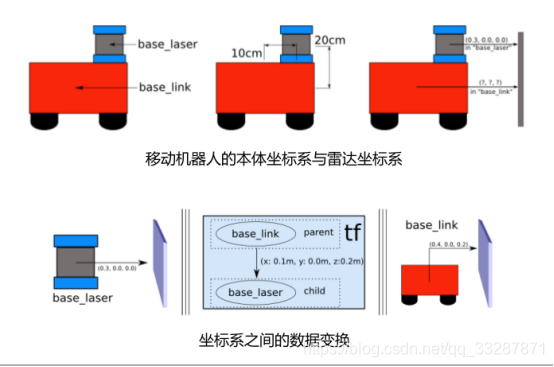
机器人中的坐标变换
 TF功能包能干什么? •五秒钟之前,机器人头部坐标系相对于全局坐标系的关系是什么样的? •机器人夹取的物体相对于机器人中心坐标系的位置在哪里? •机器人中心坐标系相对于全局坐标系的位置在哪里? TF坐标变换如何实现? • 广播TF变换 • 监听TF变换
TF功能包能干什么? •五秒钟之前,机器人头部坐标系相对于全局坐标系的关系是什么样的? •机器人夹取的物体相对于机器人中心坐标系的位置在哪里? •机器人中心坐标系相对于全局坐标系的位置在哪里? TF坐标变换如何实现? • 广播TF变换 • 监听TF变换
 以小海龟为例
以小海龟为例
$ sudo apt-get install ros-melodic-turtle-tf
$ roslaunch turtle_tf turtle_tf_demo.launch
$ rosrun turtlesim turtle_teleop_key
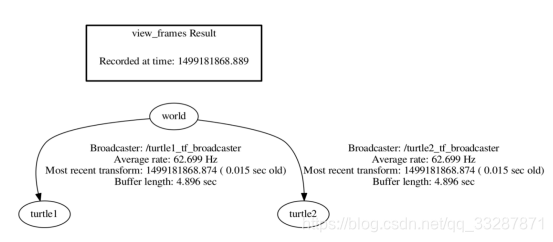
$ rosrun tf view_frames
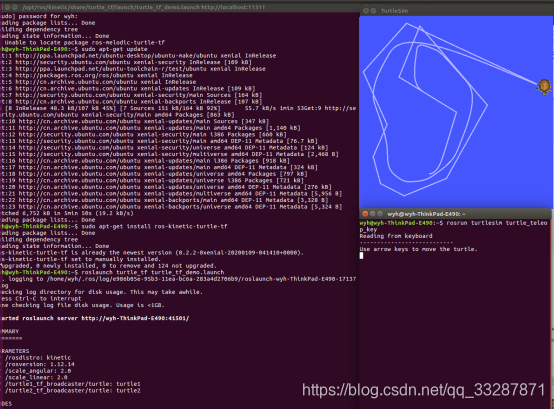 运行launch文件后会产生两只海龟,另外一只海龟会“抄近路”跟上利用键盘控制节点控制移动的那只海龟。输入rosrun tf view_frames会在home路径下产生一个PDF文件:
运行launch文件后会产生两只海龟,另外一只海龟会“抄近路”跟上利用键盘控制节点控制移动的那只海龟。输入rosrun tf view_frames会在home路径下产生一个PDF文件: