以小海龟运动仿真为例:
 在上一骗博客https://blog.csdn.net/qq_33287871/article/details/106013923中讲到了如何创建工作空间和功能包 这一篇直接在此基础上创建小海龟的功能包
在上一骗博客https://blog.csdn.net/qq_33287871/article/details/106013923中讲到了如何创建工作空间和功能包 这一篇直接在此基础上创建小海龟的功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim

 创建发布者代码(C++)
创建发布者代码(C++)
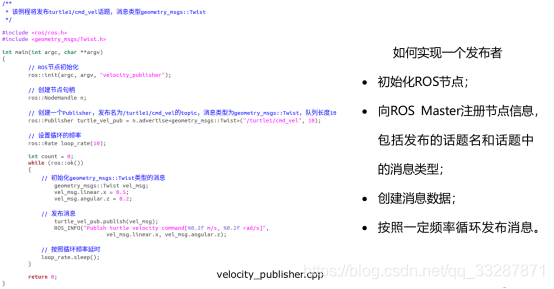
/*
该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include<ros/ros.h>
#include<geometry_msgs/Twist.h>
int main(int argc,char **argv)
{
//ROS节点初始化
ros::init(argc,argv,"velocity_publisher");
//创建节点句柄
ros::NodeHandle n;
//创建一个publisher,发布者名为/trutle1/cmd_vel的topic,消息类型为geometry——msgs::Twist,队列长度与为10
ros::Publisher turtle_vel_pub=n.advertise<geometry_msgs::Twist>("turtle1/cmd_vel",10);
//设置循环的频率
ros::Rate loop_rate(10);
int count=10;
while(ros::ok()){
//初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x=0.5;
vel_msg.angular.z=0.2;
//发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publish turtle velocity command[%0.2f m/s,%0.2f rad/s]",vel_msg.linear.x,vel_msg.angular.z);
//按照循环频率延时
loop_rate.sleep();
}
return 0;
}
 在敲代码的时候我是用vscode写的,需要事先安装C++和ROS的插件:
在敲代码的时候我是用vscode写的,需要事先安装C++和ROS的插件:
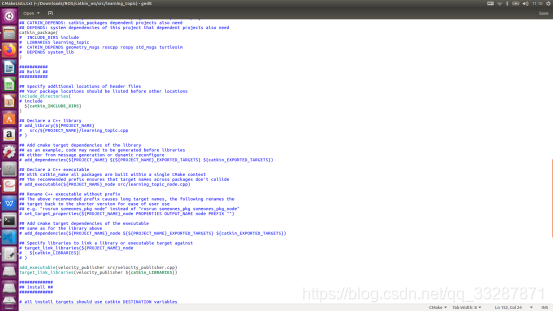
 配置发布者代码编译规则
配置发布者代码编译规则
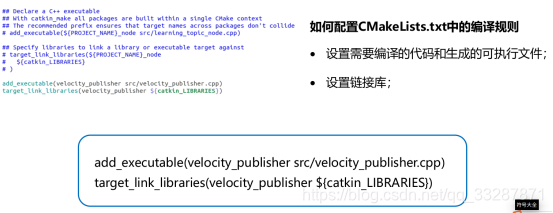 将下面两句话拷贝到learning_topic下面的CMakeList.txt文件中
将下面两句话拷贝到learning_topic下面的CMakeList.txt文件中
 编译并运行发布者
编译并运行发布者
cd ~/catkin_ws
catkin_make
source devel/setup.bash
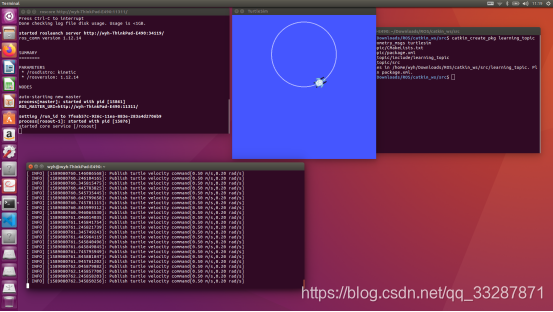
roscore
rosrun turtlesim turtlesim_node
rosrun learning_topic velocity_publisher
即可看到小海龟一直在按照之前设定的速度来做圆周运动