以小海龟运动仿真为例: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1769浏览 0评论468个赞
ROS常用命令: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1692浏览 0评论661个赞
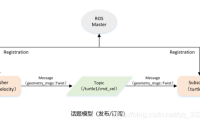
ROS当中的关键组件: Launch文件TF坐标变换Qt工具箱Rv……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3645浏览 0评论118个赞
ROS_ControlROS为开发者提供的机器人控制中间件。包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等。可以帮助机器人应用功能包快速落地,提高开……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2251浏览 0评论239个赞
ROS中的图像数据。摄像头标定。ROS+Opencv应用实例(人脸识别、物体跟踪)。二维码识别。扩展内容:物体识别与机器学习。  ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1960浏览 0评论2433个赞
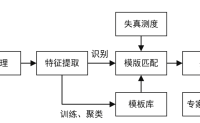
机器语音理论识别模型: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2803浏览 0评论1706个赞
做SLAM的硬件要求(不一定是必须的,看包和库的依赖): (1):差分轮式机器人,可以使用Twist速度指令控制,需要线速度和角速度。 (2):需要激光雷达、深度摄像头等测距设备,可以获取环境深度信息。 (3):最好使用正方形和圆形……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3460浏览 0评论2757个赞
Moveit的前身是PR2机器人的机械臂的代码包,之后被集成为一个软件包。它不仅可以实现单个机械臂的控制。而且可以实现两个机械臂的协调控制。而且可以RGB摄像头采集外部障碍物信息,完成自主避障这样的功能。由一系列移动操作的功能包组成,运动规划,操作控制,3D感知,运动学,控制与导……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3391浏览 0评论1014个赞
背景介绍目前,市面上大多数的拖动试教机器人是UR的协作机器人和DLR-KUKA的iiwa机器人,相比于UR机器人,iiwa机器人在结构上有一点重要的不同。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3248浏览 0评论1538个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2979浏览 0评论867个赞