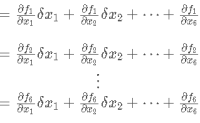
一、引入 假设有6个函数,每个函数有6个独立的变量,即: ……继续阅读 » 我是。 5年前 (2021-04-26) 2782浏览 0评论2262个赞
ROS中的图像数据。摄像头标定。ROS+Opencv应用实例(人脸识别、物体跟踪)。二维码识别。扩展内容:物体识别与机器学习。  ……继续阅读 » 小小何先生 5年前 (2021-04-26) 3556浏览 0评论1180个赞
这篇文章试图说清楚两件事:1. 几何雅克比矩阵的本质;2. KDL如何求解机械臂的几何雅克比矩阵。 一、几何雅克比矩阵的本质 机械臂的关节空间的速度可以映射到执行器末端在操作空间的速度,这种映射可以通过一个矩阵来描述,……继续阅读 » gpeng832 5年前 (2021-04-26) 2911浏览 0评论901个赞
题目有些啰嗦,到底说了个啥意思呢? 首先,是一个SlideBars控制,那啥是SlideBars控制呢? 就……继续阅读 » bug404 5年前 (2021-04-26) 2545浏览 0评论1878个赞
题目翻译 概要……继续阅读 » better_coder 5年前 (2021-04-26) 3158浏览 0评论211个赞
前言 目前课题上在做一些关于异构多机器人协同控制方面的工作(UAV + UGV),实验室里用的移动机器人为ROBOTIS公司的Tu……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2822浏览 0评论2971个赞
一、创建一个新的World 一个World是包含像对象是一个信息的文件,比如他们的样式,它们如何相互约束,天空是怎样的,重力是多少,摩擦力,物体的质量等。不同的对象称为“ 节点”,并在“ 场景树”中进行分层组织。因此,一个节点可能包含子节点。Wor……继续阅读 » 我是。 5年前 (2021-04-26) 3492浏览 0评论2036个赞
对于机械臂视觉抓取功能来说,比较传统的做法:由于之前的物体识别模块已经确定了这片点云对应的物体,如果我们有物体的3D模型,便可以直接用ICP算法将这片点云与物体的3D模型对齐。既然知道3D模型的位姿那就好办了。之后就是各种抓取姿态生成、力封闭之类的东西了。其他方法:利用RCNN在……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2227浏览 0评论2536个赞
目前为止, 我们都旨在构建一个能够自主运行的机器人,这个就研究方向更加合理的名词应该叫自主移动机器人. 推荐一本个人觉得很不错的书 Ro……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1673浏览 0评论293个赞
环境:Ubuntu16.04 + ROS kinetic 安装joy package joy package为通用的Linux操纵杆提供了ROS驱动,它包括了一个joy_node节点,可以让Linux操纵杆和ROS交互……继续阅读 » 十啵 5年前 (2021-04-26) 1645浏览 0评论1215个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 3356浏览 0评论833个赞
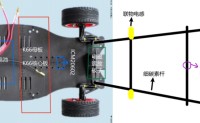
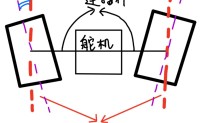
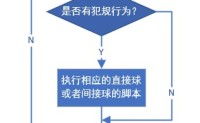
写在前面之前我已经写过了关于这个足球机器人4V4对抗赛的总思路,具体请看以下链接……继续阅读 » better_coder 5年前 (2021-04-26) 3290浏览 0评论268个赞
写在前面 上一节我们实现了基本的2D-SLAM导航包的使用。 本节我们将在2D-SLAM的基础上,通过手动遥控实现控制云台俯仰角来生成三维点云(如下图,视频还没上传可以在我朋友圈看)。 ……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2815浏览 0评论2232个赞
介绍 现在,我们将编程一个简单的控制器,该控制器将使机器人向前移动。 ……继续阅读 » 我是。 5年前 (2021-04-26) 2689浏览 0评论211个赞
前言 现在我们开始解决与编程机器人控制器有关的主题。我们将设计一个简单的控制器,避免前面教……继续阅读 » 我是。 5年前 (2021-04-26) 3605浏览 0评论1110个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1687浏览 0评论2342个赞
QT rqt_console 收集日志信息,方便做筛选,调试 ……继续阅读 » nidie508 5年前 (2021-04-26) 3525浏览 0评论776个赞
首先感谢实验课的助教工作,然我看到了学生们的热情以及大家的智慧。这是我在其中绘图机器人实验的基础上进行复现完成的一次demo演示。 ……继续阅读 » 光头明明 5年前 (2021-04-26) 3711浏览 0评论515个赞
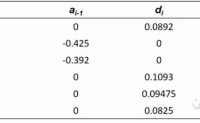
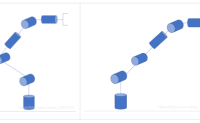
计算正向运动学通常需要使用D-H参数法对机械臂建模。 第一步: 绘制机械臂模型图 可用手绘机械臂结构简图或者模型图,使用圆柱体代表转动关节和线表示的连杆,当写论文的时候,可以使用PPT或者CAD来绘图,ppt里面提供了很多现成的线条形状,通过组合功能可以设计出很ni……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3169浏览 0评论348个赞
1.加载待扩展的虚拟机->编辑虚拟机设置 ……继续阅读 » bbtang5568 5年前 (2021-04-26) 1720浏览 0评论1054个赞
本文的内容是对另一篇文章(链接)的补充,对Trajectory_example.cpp涉及到的原理作一些简单的讲解,主要内容是: (1)机器人路径规划圆弧过渡的原理;……继续阅读 » gpeng832 5年前 (2021-04-26) 2457浏览 0评论2734个赞
此教程以webots_demo为基础……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2413浏览 0评论155个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1989浏览 0评论376个赞
上一篇文章我们已经了解了似然函数是什么,但怎么去把里面的……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2905浏览 0评论1681个赞
一、MPC的力学原理 刚体的力与加速度,转矩与角加速度可以通过牛顿方程和欧拉方程求出: ……继续阅读 » 我是。 5年前 (2021-04-26) 3686浏览 0评论1005个赞
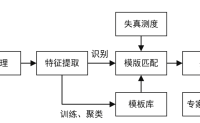
机器语音理论识别模型: ……继续阅读 » 小小何先生 5年前 (2021-04-26) 2918浏览 0评论1315个赞
使用eigen库进行空间变换 在三维空间中,常常需要变换当前机器人的位姿计算定义的绝对坐标系和当前机器人所处相对坐标系之间的关系。而主要的变换则是平移和旋转,有时候可能需要尺度变换,那么就可以描述为: &nb……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 2623浏览 0评论1020个赞
参考:http://wiki.ros.org/cn/ROS/Tutorials/CreatingMsgAndSrv 参考:http://wiki.ros.org/cn/ROS/Tutorials/WritingServiceClient%28c%2B%2B%29 要……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2558浏览 0评论2102个赞
文章目录① 背景② 前提③ 任务Ⅰ准备Ⅱ 日……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 1884浏览 0评论1858个赞
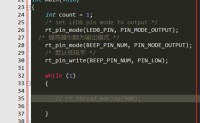
问题描述今天在上嵌入式课时候又学习到了新知识哈,美滋滋~ 情况是这样的,我在STM32F429上跑RT-Thread系统,因为rtt系统里面既有.cpp文件又有.c函数(kei……继续阅读 » better_coder 5年前 (2021-04-26) 2132浏览 0评论670个赞
通过学习KDL开源项目的代码可以学习CMake构建程序的知识,现简单介绍一下orocos_kinematics_dynamics-master\orocos_kinematics_dynamics-master\orocos_kdl\examples\CMakeList.txt文……继续阅读 » gpeng832 5年前 (2021-04-26) 3322浏览 0评论1077个赞
PointCloud 点云处理方法总结(代码案例版) 本文将自己在点云处理过程中,遇到的一些常用的具体方法进行总结,不介绍点云数据处理的基本概念,主要是处理过程中的代码总结……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 2888浏览 0评论915个赞
通常在机械臂腕部与末端夹持器之间安装六维力传感器,用于机器人在装配过程中的力反馈控制。六维力传感器能够测量三维空间中任何坐标系下的三维力 和三维力矩。 在机械臂处于静态时,机械臂腕部六维力传感器测出的力与力矩数据由三部……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2829浏览 0评论1845个赞
对于机器人的视觉这些信息,很容易在ROS中呈现,但是对于ROS中力和力矩信息的展示,通常在实验室的时候使用真实的机器人和传感器,这个问题不需要考虑,直接读取真实的力和力矩传感器,然后通过ROS消息发布即可。可当疫情导致的有学不能上,有实验室不能去的时候,想在ROS中检验机器人力控……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2887浏览 0评论484个赞
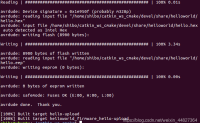
为什么要利用CMake编译代码并上传到arduino? 当需要开发大点的软件项目,Arduino IDE对代码的管理就变得比较笨拙。 如果你经常想要从命令行或能自动完成的eclipse编译代码 最后你可以通过rosserial_client的CMake基础架构,你利用ROS bu……继续阅读 » 十啵 5年前 (2021-04-26) 2949浏览 0评论844个赞
SysTick_Handler介绍今天我给大家分享一个基于SysTick_Handler中断实现的按键扫描。SysTick_Handler是……继续阅读 » better_coder 5年前 (2021-04-26) 1888浏览 0评论1864个赞
做SLAM的硬件要求(不一定是必须的,看包和库的依赖): (1):差分轮式机器人,可以使用Twist速度指令控制,需要线速度和角速度。 (2):需要激光雷达、深度摄像头等测距设备,可以获取环境深度信息。 (3):最好使用正方形和圆形……继续阅读 » 小小何先生 5年前 (2021-04-26) 2683浏览 0评论2683个赞
实物图先来给大家看看我们优秀队友建的手持设备实物图的3D模型吧 &nbs……继续阅读 » better_coder 5年前 (2021-04-26) 3391浏览 0评论2447个赞
1.数据格式 在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud sensor_msgs::PointCloud2……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 3560浏览 0评论179个赞
目录目录ROS 传感器消息ROS 传感器消息之Laserscan……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 2274浏览 0评论1725个赞
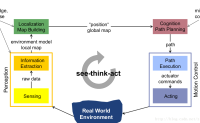
0x00 为何需要对机器人进行定位? 要想实现移动式机器人的自动导航需要完成以下六点,当然这些信息是我自己总结的仅供大家参考: (1)一张完整的高精度全局地图,机器人需要在该地图下完成自动导航,这是进行自动导航的必要且重要的前提; (2)机器人在地图的……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2921浏览 0评论2885个赞
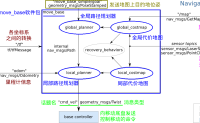
0x00 什么是costmap代价地图 在机器人进行路径规划时,我们需要明白规划算法是依靠什么在地图上来计算出来一条路径的。依靠的是gmapping扫描构建的一张环境全局地图,但是仅仅依靠一张原始的全局地图是不行的。因为这张地图是静……继续阅读 » ROS小课堂 5年前 (2021-04-26) 1917浏览 0评论1437个赞
0x00 为何需要路径规划? 现在我们已经可以构建当前环境地图,可以实现机器人在当前地图中的定位。那接下来就可以在地图上给定目标点,开始规划路径控制机器人移动过去,这样就可以完成在已知地图中进行自动导航的任务了。在已知地图中进行路径规划可以举一个很形象的例子,大家在……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2234浏览 0评论345个赞
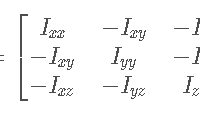
一、刚体的惯性张量 在单自由度系统中,常常要考虑刚体的质量。对于定轴转动的情况,经常用到惯量矩这个概念。对一个可以在三维空间自由运动的刚体来说,可能存在无穷个旋转轴。在一个刚体绕任意轴做旋转运动时,我们需要一种能够表征刚体质量分布的方法。在这里,我们需要引入惯性张量……继续阅读 » gpeng832 5年前 (2021-04-26) 1966浏览 0评论1232个赞
在做图像语言分隔的时候,我们往往需要计算出像素精确度,交并比等值来评估我们的算法或者神经网络的表现。本篇文章着重介绍如何用numpy实现像素精确度、平均像素精确度、平均交并比和加权的交并比的计算。 在正式开始之前需要先掌握几个numpy的函数和编程技巧。  ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2113浏览 0评论175个赞




![[ros2学习]-CLI Tools – 创建启动文件(launch)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200402190414829.gif#pic_center&h=123&w=200&q=90&zc=1&ct=1)







![webots版本升级 webots 2021a 注意点[补写]](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210228_42739.png&h=123&w=200&q=90&zc=1&ct=1)



![[ros2学习]-CLI Tools – 使用rqt_console](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/2020040218271515.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl8zNjYyODc3OA==,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)