前言: 近些年来足式机器人在国内外发展的非常火热,其中控制方法可以说是百花齐放,在MIT开源其基于凸优化的MPC方法之前,许多小伙伴都是采用MIT在很早时候提出的Virtual Model Control(VMC)……继续阅读 » JameScottX 5年前 (2021-04-26) 2960浏览 0评论1438个赞
本片博客描述:如何使用 tf2_ros::MessageFilter 处理 Stamped(时间戳) 数据类型在 TF2 的 体系下 如何使用传感器的数据在 实际 情况下 传感器的数据包括: 相机、激光雷达……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 2176浏览 0评论1347个赞
线性近似最常使用的函数近似就是线性近似和人工神经网络。本节介绍线性近似。线性近似是用许多特征向量的线性组合来近似价值函数。特征向量则依赖于输入(即状态或状态动作对)。以动作价值近似为例,我们可以为每个状态动作对定义多个不同的特征x ( s , ……继续阅读 » 柯南404 5年前 (2021-04-26) 2128浏览 0评论2637个赞
超声波避障程序随处可见,基于51单片机的超声波避障小车也很成熟,但是完整的Proteus仿真并不容易找到开源资料。这次主要给大家分享其Proteus仿真部分。涉及到的模块有:超声波模块(hc-sr04)、L293D电机驱动器和直流减速电机。这/样配合51单片机的控制,小车……继续阅读 » 鲁棒最小二乘支持向量机 5年前 (2021-04-26) 1881浏览 0评论2211个赞
上一篇文章我们简单介绍了信息熵的概念,知道了信息熵可以表达数据的信息量大小,是信息处理一个非常重要的概念。……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1756浏览 0评论2221个赞
目录一、旋转运动学1.1 线速度与角速度1.2……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2898浏览 0评论2182个赞
由上面一篇文章我们已经知道了,如果我们从真实数据分布里面取n个样本,根据给定样本我们可以列出其出现概率的表达式,那么生成这N个样本数……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1934浏览 0评论1537个赞
……继续阅读 » 长风弦歌 5年前 (2021-04-26) 3109浏览 0评论678个赞
Real-Time Loop Closure in 2D LIDAR SLAM文章精读原文:W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop Closure in 2D LIDA……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2559浏览 0评论535个赞
1 前言之前写了几篇关于UR机器人网络控制的文章:《UR机器人返回信息格式解析》、《UR机器人通信端口和协议》,有不少读者问关于编程实现方面的问题,因此,这里上传有关的代码,供同行参考。2 包含内容我这里是用VS……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 2971浏览 0评论2319个赞
目前,网上大部分源代码有的是基于摄像头检测人物,有的是基于激光雷达信号检测人物,两种方式各有利弊。摄像头检测准确度高,但有死角;激光雷达检测准确度偏低,但能做到360°无死角,基于这个考虑,笔者编写一个算法,集成两者优长,做到智能机器人360°高精度跟踪移动人物。……继续阅读 » 否极 5年前 (2021-04-26) 1674浏览 0评论1079个赞
1 概念1.1 机器人本文讨论的机器人,为空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 2414浏览 0评论462个赞
强化学习(五) – 时序差分学习(Temporal-Difference Learning)及其实例5.1 TD预测例5.1 回家时……继续阅读 » Stan Fu 5年前 (2021-04-26) 2104浏览 0评论521个赞
本篇文章是之前期望极大算法(EM算法)文章的后续,有需要可以先看看那篇文章关于EM算法的推导。高斯混合模型……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2374浏览 0评论2938个赞
深度Q学习深度Q学习将深度学习和强化学习相结合,是第一个深度强化学习算法。深度Q学习的核心就是用一个人工神经网络q ( s , a ; w ) , s ∈ S , a ∈ A 来代替动作价值函数。由于神经网络具有强大的表达能力,能够……继续阅读 » Stan Fu 5年前 (2021-04-26) 2854浏览 0评论2420个赞
AMCL首次启动总有个烦恼的问题,就是手动初始化位姿很难给出准确的,也不会自动更新,像下面这样 像这样做成产品当然不行啦。解决上面的问题主要有两个思想(1)用户给个大概初始位姿,算法自动更新寻找真实值(2……继续阅读 » yuanguobin01 5年前 (2021-04-26) 2223浏览 0评论753个赞
ROS中的地图ROS中的导航……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3607浏览 0评论243个赞
作者在读学校Singapore University of ……继续阅读 » RedGlass 5年前 (2021-04-26) 3546浏览 0评论1790个赞
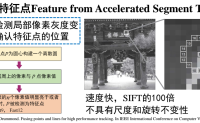
@[toc]一、ORB特征<……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2493浏览 0评论1482个赞
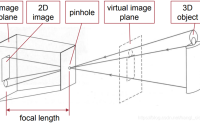
1 概述镜头透镜由于制造精度以及组装工艺的偏差会引入畸变,导致原始图像的失真,即图像畸变。在前一篇文章《机器视觉模型——投影矩阵》中描述了机器视觉系统成像模型,在这个模型里包含了相机内参(与像元尺寸、焦距、像素中心有关)以及相……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 1572浏览 0评论2473个赞
在Gan生成对抗神经网络中会用到Jensen不等式,因此做下记录。Jensen不等式告诉我们:如果f ff是在区间[ a , b ] 上的凸函数(就是导数一直增长的函数,或者说是导数的导数大于0的函数),x 是随机变量,那么有:……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1577浏览 0评论2259个赞
问题的引出:AMCL的初始位姿通常要求用户手动输入,或者机器加载上一次保存的位姿。AMCL中自带的全局定位服务(globalLocalizationCallback)实际中基本很难用得上。问题解决思路:相机……继续阅读 » yuanguobin01 5年前 (2021-04-26) 3039浏览 0评论880个赞
强化学习(六) – 连续空间中的强化学习6.1 连续空间中的强化学习6.2 离散空间和连续空间……继续阅读 » Stan Fu 5年前 (2021-04-26) 2409浏览 0评论950个赞
DQN算法实战-小车上山案例分析实验环境用线性近似求解最优策略用深度Q学习求解最优策略 ……继续阅读 » 柯南404 5年前 (2021-04-26) 2156浏览 0评论782个赞
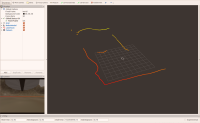
1、变换设置 设计一……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3627浏览 0评论927个赞
策略梯度方法-python车杆平衡实战案例分析同策策略梯度算法求解最优策略异策策略梯度算法求解最优策略……继续阅读 » 柯南404 5年前 (2021-04-26) 3266浏览 0评论814个赞
坐标系中,一个刚体的状态可用位置和姿态来描述,位置即为该刚体在坐标系中的空间位置,用一个坐标向量即可表达。而要描述刚体的姿态,有很多种表示方法,以下列出常用的:1 旋转矩阵(Rotation matrix)旋转矩阵是在乘以一个……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 2965浏览 0评论1271个赞
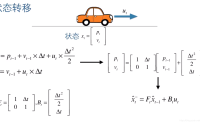
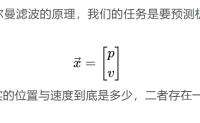
基本概念:1、状态方程: 某一时刻的状态用Xt表示,它是一个列向量,表征了当前位置Pt和当前速……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 3427浏览 0评论2393个赞
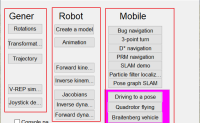
0x00 概述在前面的教程中,一直都是使用默认提供的一个地图。是不是stdr只能使用这个地图呢?那你就太小看stdr了,它加载地图的方式其实跟我们在amcl中要进行定位时的地图是一样的,都是需要类……继续阅读 » ROS小课堂 5年前 (2021-04-26) 3384浏览 0评论666个赞
……继续阅读 » yuanguobin01 5年前 (2021-04-26) 3801浏览 0评论1997个赞
actor-critic方法(一)— 同策方法同策actor-critic方法动作价值actor-critic算法优势actor-critic算法……继续阅读 » 柯南404 5年前 (2021-04-26) 3474浏览 0评论259个赞
ROS TF2当前坐标系如何计算其它历史坐标系的坐标变换1、时间旅行2、更高级 的 lookupTransform() 函数 API3、检查结果4、 完成……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3409浏览 0评论2583个赞
英文原文链接:http://www.bzarg.com/p/how-a-ka……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2312浏览 0评论2811个赞
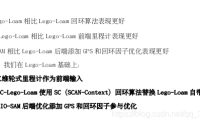
1.序言倒腾一段时间的LIO-SAM,实在是累,是那种没任何收获的感觉。吐槽几点……继续阅读 » yuanguobin01 5年前 (2021-04-26) 2350浏览 0评论662个赞
1 机器视觉为什么要做相机标定机器视觉是采用相机成像来实现对三维场景的测量、定位、重建等过程。是一个利用二维图像进行三维反推的过程,我们所处的世界是三维的,而图像或者照片是二维的,可以把相机认为是一个函数,输入量是一个三维场景,输出量是一幅二维图像。正……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 1938浏览 0评论1190个赞
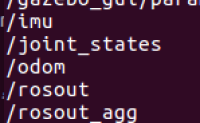
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本基于Ubuntu 14.04 LTS系统所用ROS版本为 Indi……继续阅读 » windSeS 5年前 (2021-04-26) 1907浏览 0评论2352个赞
在MDP环境中训练Q learning创建MDP智能体环境创建Q learning智能体训练Q learning智能体验证Q learning结果……继续阅读 » 柯南404 5年前 (2021-04-26) 2259浏览 0评论1686个赞
ROS TF2 中的 四元数 基础部分1、四元数的组成……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3586浏览 0评论1595个赞
1 概述机器视觉就是用机器代替人眼和人脑来做测量和判断。机器视觉系统工作的基本过程是获取目标的图像后,对图像进行识别、特征提取、分类、数学运算等分析操作,并根据图像的分析计算结果,来对相应的系统进行控制或决策的过程。在很多机器视觉应用中……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 2460浏览 0评论2507个赞
在机械工程中,Denavit-Hartenberg 参数(也称为 DH 参数)是与一个特定约定相关联的四个参数,用于将参考坐标系附加到空间运动链或机器人操作臂的连杆上。“Jacques Denavit and Richard Hartenberg ……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2213浏览 0评论1181个赞
0x00 gmapping简介gmapping是一种高效的Rao-Blackwellized粒子滤波器,用于根据激光雷达测距数据来生成2D珊格地图。gmapping是OpenSLAM下……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2980浏览 0评论2563个赞
马尔可夫决策-悬崖寻路python实现案例分析要点概括环境使用求解Bellman期望方程求解Bellman最优方程总……继续阅读 » 柯南404 5年前 (2021-04-26) 2201浏览 0评论826个赞
【Matlab Robotics Toolbox】robotics toolbox学习及使用记录,方便自己后面复习、改进。基于Matlab R2019b 9.5; Peter Corke的Robotics Toolbox 10.3.1……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2942浏览 0评论777个赞
hector_quadrotor编译总结 | ubuntu 16.04 ros-kinetic版本基于Ubuntu 16.04 LTS系统所用ROS版本为 Kin……继续阅读 » windSeS 5年前 (2021-04-26) 3288浏览 0评论280个赞
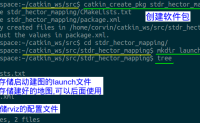
0x00 hector_mapping简介hector_mapping是一种SLAM算法,它可以在没有里程计的情况在未知环境下构建当前环境的地图。跟gmapping不同,gmapping建图时需要……继续阅读 » ROS小课堂 5年前 (2021-04-26) 3497浏览 0评论1498个赞


![[强化学习实战]函数近似方法-线性近似与函数近似的收敛性](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201023201342502.png#pic_center&h=123&w=200&q=90&zc=1&ct=1)










![[强化学习实战]深度Q学习-DQN算法原理](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201023224237312.png#pic_center&h=123&w=200&q=90&zc=1&ct=1)





![[强化学习实战]DQN算法实战-小车上山(MountainCar-v0)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201024095956671.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dhbmd5aWZhbjEyMzQ1Nnp6,size_16,color_FFFFFF,t_70#pic_center&h=123&w=200&q=90&zc=1&ct=1)

![[强化学习实战]策略梯度方法(policy gradient)-python车杆平衡实战](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201026110818256.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dhbmd5aWZhbjEyMzQ1Nnp6,size_16,color_FFFFFF,t_70#pic_center&h=123&w=200&q=90&zc=1&ct=1)







![[强化学习实战]马尔可夫决策-悬崖寻路python实现](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201030132741678.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dhbmd5aWZhbjEyMzQ1Nnp6,size_16,color_FFFFFF,t_70#pic_center&h=123&w=200&q=90&zc=1&ct=1)