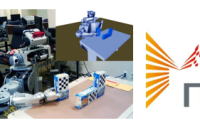
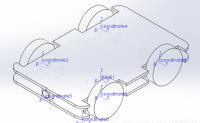
前记: 之前学习了很多关于ROS的知识,现在想自己制作一个四轴器械臂来练练手。所以就定为arm0.1版本,使用MG90s舵机来搭建一个四轴机械臂。arm0.1版本的目标是对不同颜色的方块进行分类并在Gazebo中模拟出来。 ……继续阅读 » 5年前 (2021-04-26) 3097浏览 0评论1653个赞
【从零开始的ROS四轴机械臂控制(二)】 四、urdf文件及gazebo仿真……继续阅读 » 5年前 (2021-04-26) 2717浏览 0评论1590个赞
【从零开始的ROS四轴机械臂控制(三)】五、在gazebo中添加摄像头1.修改……继续阅读 » 5年前 (2021-04-26) 3224浏览 0评论771个赞
【从零开始的ROS四轴机械臂控制(四)】七、图像处理节点1.节点功能与实现方法……继续阅读 » 5年前 (2021-04-26) 2793浏览 0评论1673个赞
【从零开始的ROS四轴机械臂控制(五)】八、运动控制节点1.定义服务GoToP……继续阅读 » 5年前 (2021-04-26) 3062浏览 0评论2394个赞
【从零开始的ROS四轴机械臂控制(六)】 九、逻辑控制节点1.运动……继续阅读 » 5年前 (2021-04-26) 3675浏览 0评论956个赞
从零开始的ROS四轴机械臂控制(七)十、ROS与arduino连接1.虚拟机与……继续阅读 » 5年前 (2021-04-26) 1746浏览 0评论2607个赞
引言 在这个-SLAM建图和导航仿真实例-项目中,主要分为三个部分,分别是 (一)模型构建(二)根据已知地图进行定位和导航(三)使用RTAB-MAP进行建图和导航……继续阅读 » 5年前 (2021-04-26) 2974浏览 0评论2035个赞
引言 在这个-SLAM建图和导航仿真实例-项目中,主要分为三个部分,分别是 (一)模型构建(二)根据已知地图进行定位和导航(三)使用RTAB-MAP进行建图和导航……继续阅读 » 5年前 (2021-04-26) 3552浏览 0评论2229个赞
……继续阅读 » 5年前 (2021-04-26) 2926浏览 0评论2461个赞
强化学习(英语:Reinforcement learning,简称RL)是机器学习中的一个领域,强调如何基于环境而行动,以取得最大化的预期利益。其灵感来源于心理学中的行为主义理论,即有机体如何在环……继续阅读 » 5年前 (2021-04-26) 2864浏览 0评论431个赞
3.动态规划3.1 介绍……继续阅读 » 5年前 (2021-04-26) 3409浏览 0评论180个赞
强化学习(三) – Gym库介绍和使用,Markov决策程序实例,动态规划决策实例1. 引言在这个部分补充之前马尔科夫决策和动态规划部分的代码。在以后的内容我会把相关代码都附到相关内容的后面。本部分代码和将来的代码会参考《……继续阅读 » 5年前 (2021-04-26) 2946浏览 0评论1995个赞
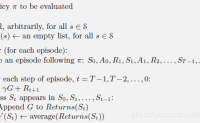
强化学习(四) – 蒙特卡洛方法(Monte Carlo Methods)及实例……继续阅读 » 5年前 (2021-04-26) 3665浏览 0评论413个赞
强化学习(五) – 时序差分学习(Temporal-Difference Learning)及其实例5.1 TD预测例5.1 回家时……继续阅读 » 5年前 (2021-04-26) 2920浏览 0评论1966个赞
深度Q学习深度Q学习将深度学习和强化学习相结合,是第一个深度强化学习算法。深度Q学习的核心就是用一个人工神经网络q ( s , a ; w ) , s ∈ S , a ∈ A 来代替动作价值函数。由于神经网络具有强大的表达能力,能够……继续阅读 » 5年前 (2021-04-26) 2220浏览 0评论731个赞
强化学习(六) – 连续空间中的强化学习6.1 连续空间中的强化学习6.2 离散空间和连续空间……继续阅读 » 5年前 (2021-04-26) 3362浏览 0评论2354个赞
深度Q学习原理及相关实例8. 深度Q学习8.1 经验回放8.2 目标网络8.3 相关算法8.4……继续阅读 » 5年前 (2021-04-26) 1940浏览 0评论2927个赞







![[强化学习实战]深度Q学习-DQN算法原理](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201023224237312.png#pic_center&h=123&w=200&q=90&zc=1&ct=1)

