第一次编程操作UR10协作机器人的记录 1 引言 UR机器人参考:丹麦优傲机器人 ……继续阅读 » 5年前 (2021-04-26) 3615浏览 0评论2323个赞
1 概述 UR机器人作为目前使用广泛的协作机器人,其开放了基于TCP/IP的远程控制功能,提供了多个多类型的端口,用于工业总线控制,或者用户自行编程控制,以下记录整理此方面的信息。 2 UR机器人通信2.1 ……继续阅读 » 5年前 (2021-04-26) 3106浏览 0评论2767个赞
1 概述UR机器人提供了多种端口,用于控制和读取机器人信息,本人整理了相关信息,见文章《UR机器人通信端口和协议》。本人使用了3000……继续阅读 » 5年前 (2021-04-26) 2378浏览 0评论695个赞
最近由于研究机器人的运动控制,所以复习和查阅了一些关于坐标系变换的资料,记录一下,以备使用。1 空间点的坐标变换以下公式中,规定几种标识:1) 坐标系A用{A}表示,同理,有{B};2) 左……继续阅读 » 5年前 (2021-04-26) 2042浏览 0评论1192个赞
1 欧拉角概念百度百科:欧拉角,用来确定定点转动刚体位置的3个一组独立角参量,欧拉角由章动角θ、旋进角(即进动角)ψ和自转角Φ组成。欧拉角为欧拉首先提出而得名。维基百科:Euler angles,莱昂哈德·欧拉用欧拉角来描述刚……继续阅读 » 5年前 (2021-04-26) 2904浏览 0评论875个赞
1 前言之前写了几篇关于UR机器人网络控制的文章:《UR机器人返回信息格式解析》、《UR机器人通信端口和协议》,有不少读者问关于编程实现方面的问题,因此,这里上传有关的代码,供同行参考。2 包含内容我这里是用VS……继续阅读 » 5年前 (2021-04-26) 1736浏览 0评论645个赞
1 概念1.1 机器人本文讨论的机器人,为空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的……继续阅读 » 5年前 (2021-04-26) 3331浏览 0评论555个赞
1 概述镜头透镜由于制造精度以及组装工艺的偏差会引入畸变,导致原始图像的失真,即图像畸变。在前一篇文章《机器视觉模型——投影矩阵》中描述了机器视觉系统成像模型,在这个模型里包含了相机内参(与像元尺寸、焦距、像素中心有关)以及相……继续阅读 » 5年前 (2021-04-26) 2038浏览 0评论699个赞
坐标系中,一个刚体的状态可用位置和姿态来描述,位置即为该刚体在坐标系中的空间位置,用一个坐标向量即可表达。而要描述刚体的姿态,有很多种表示方法,以下列出常用的:1 旋转矩阵(Rotation matrix)旋转矩阵是在乘以一个……继续阅读 » 5年前 (2021-04-26) 2806浏览 0评论407个赞
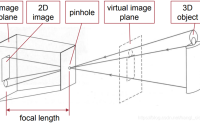
1 机器视觉为什么要做相机标定机器视觉是采用相机成像来实现对三维场景的测量、定位、重建等过程。是一个利用二维图像进行三维反推的过程,我们所处的世界是三维的,而图像或者照片是二维的,可以把相机认为是一个函数,输入量是一个三维场景,输出量是一幅二维图像。正……继续阅读 » 5年前 (2021-04-26) 2698浏览 0评论2144个赞
1 概述机器视觉就是用机器代替人眼和人脑来做测量和判断。机器视觉系统工作的基本过程是获取目标的图像后,对图像进行识别、特征提取、分类、数学运算等分析操作,并根据图像的分析计算结果,来对相应的系统进行控制或决策的过程。在很多机器视觉应用中……继续阅读 » 5年前 (2021-04-26) 2953浏览 0评论977个赞