前面几节,我们已经把PPO算法实现完成了,下面只剩下环境了。今天我们把环境的封装完成。对于机械臂或者机器人的训练来说,一个比较好用的仿真器是pybullet,另外一个是unity。gazebo、vrep等虽然可以做,但是相比pybullet直接使用Pyth……继续阅读 » bug404 5年前 (2021-04-26) 3900浏览 0评论1987个赞
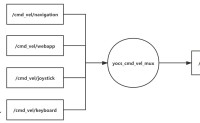
在我们控制一个移动机器人运动时,可能会遇到如下场景:自研的移动机器人在自动导航的过程中突然迷路要撞墙了,一场车祸马上就要发生,这时候,我们就会很希望能够通过无线手柄或者键盘去控制小车紧急停车,让小车改邪归正,迷途知返。想要实现这个功能,就需要用到多路输入复用……继续阅读 » 跃动的风 5年前 (2021-04-26) 2526浏览 0评论463个赞
背景介绍目前,市面上大多数的拖动试教机器人是UR的协作机器人和DLR-KUKA的iiwa机器人,相比于UR机器人,iiwa机器人在结构上有一点重要的不同。……继续阅读 » lovely_yoshino 5年前 (2021-04-26) 2734浏览 0评论1421个赞
前言第一次写博客,内心很激……继续阅读 » 小沐爱折腾 5年前 (2021-04-26) 2606浏览 0评论2726个赞
写在前面……继续阅读 » better_coder 5年前 (2021-04-26) 2649浏览 0评论980个赞
在学校听的华为云ModelArts的公开课。其实大部分都是在讲深度学习的入门,也稍微介绍了一下华为云的这个深度学习平台。……继续阅读 » 喵木木 5年前 (2021-04-26) 3242浏览 0评论1806个赞
写在前面……继续阅读 » better_coder 5年前 (2021-04-26) 3448浏览 0评论850个赞
最近在做基于Kinect的手势识别,这里介绍一下Kinect的使用1.Kinect在Qt中的安装下载Kin……继续阅读 » kissgoodbye2012 5年前 (2021-04-26) 3440浏览 0评论2349个赞
……继续阅读 » 玥茹苟 5年前 (2021-04-26) 3659浏览 0评论647个赞
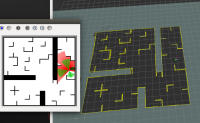
本人为了对比研究三大经典SLAM算法(Gmapping、Cartographer、Hector)的优缺因此考虑在Turtlebot3仿真环境下对这三个SLAM算法进行测试。没想到测试第一个算法(Google的cartographer)就花……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2067浏览 0评论1998个赞
描述本文将简要介绍机械臂手眼标定原理及相关知识,包会基础知识了解手眼标定原理,就必须先了解一句话,叫做……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 3575浏览 0评论2505个赞
cartographer+turtlebot+hokuyo|安装配置系统:ubuntu 14.04+ros indigo 或 ubuntu 16.04+ros kinetic平台:turtlebot2传感器:hokuyo U……继续阅读 » windSeS 5年前 (2021-04-26) 2491浏览 0评论702个赞
目的……继续阅读 » robinvista 5年前 (2021-04-26) 2481浏览 0评论351个赞
*课程资料请到微信公众号“古月居”后台回复“人机交互资料”获取该课程已开通专门交流……继续阅读 » 古月居官方 5年前 (2021-04-26) 3261浏览 0评论918个赞
前言在使用ROS的过程中,我们常常需要使用复杂的编译源代码和相关的解析操作,才能单独对某一个任务进行启动。在修改时,也需要单独打开某个文件、编辑、保存,这个过程比较繁琐。这些数据信息均需要在终端中以字符的方式显示出来,键入命令同样需……继续阅读 » lovely_yoshino 5年前 (2021-04-26) 1920浏览 0评论1115个赞
1. 引言 上一篇文章主要介绍了机……继续阅读 » hitgavin 5年前 (2021-04-26) 3355浏览 0评论1945个赞
1、添加ROS软件源 将以下命令复制到ubuntu的终端执行<……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3210浏览 0评论2040个赞
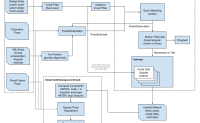
一、前言该篇为本文的重点,主要内容为cartographer_turtlrbot3源码库的安装二、cartographer_turtlebot源码库安装这里基本参考创客智造的安装教程,但是由于教……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2253浏览 0评论2692个赞
目的……继续阅读 » robinvista 5年前 (2021-04-26) 2377浏览 0评论2117个赞
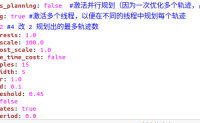
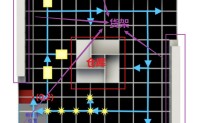
决定总结最近一个月的工作,这个月在orbslam2的基础上,使用kineticV2完成了稠密点云地图的重建,实现了点云的回环,并使用octomap转换成实时的八叉树地图,导航部分已经有了思路,打算下个月所一个基于octomap的航迹生成能用在视觉的导航上。……继续阅读 » lovely_yoshino 5年前 (2021-04-26) 3672浏览 0评论2202个赞
1、做了一个可视化的蒙特卡洛求解工作空间的程序……继续阅读 » 跃动的风 5年前 (2021-04-26) 2723浏览 0评论2831个赞
通过实例来学习可以说是最快的了,这里开始就是实例了!理论请看前一篇文章:Kalman滤波器的应用解释1……继续阅读 » kissgoodbye2012 5年前 (2021-04-26) 2752浏览 0评论470个赞
0x00 概述在前面的文章中,我们介绍如何自动导航时,都是基于使用gmapping或者hector_mapping创建的地图。当然使用其他的建图方法创建的地图也可以,但是目前为止,无论使用哪种建图方法。通过激光雷达或深……继续阅读 » ROS小课堂 5年前 (2021-04-26) 3673浏览 0评论927个赞
二、工业机器人动力学 机器人动力学描述的是关节力矩、动力学参数及关节运动的关系,用于机器人动力学建模的方法很多,如牛顿-欧拉方法、拉格朗日方法、凯恩方法、算子代数方法等。对于同一个机器人,无论采用何……继续阅读 » Kocurry 5年前 (2021-04-26) 2474浏览 0评论496个赞
引言臂形机器人或机械臂是一种我们常见和熟知的机器人类型,机械臂与移动机器人不同,不能再环境中任意移动,有一个固定的基座,因此工作空间有限。非移动的机器人大大简化了诸如感知力和安全性的问题。……继续阅读 » unique_jie 5年前 (2021-04-26) 2419浏览 0评论1387个赞
写在前面……继续阅读 » better_coder 5年前 (2021-04-26) 2565浏览 0评论1114个赞
一个月不见,甚是想念,又和大家见面了,今天主要想和大家聊聊全向轮底盘运动。 首先先介绍一下什么是全向轮吧。全向轮是海丹等人的一款专利产品。全向轮包括轮毂和从动轮,该轮毂的外圆周处均匀开设有3个或3个以上的轮毂齿,每两个轮毂齿之间装设有一从动轮,该从动轮的径向方向……继续阅读 » nidie508 5年前 (2021-04-26) 3606浏览 0评论2091个赞
坐标系变换方程 如果有n个未知变换和n个变换方程,这个变换可由变换方程解出。例如:图1中变换……继续阅读 » lovely_yoshino 5年前 (2021-04-26) 2505浏览 0评论668个赞
……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2093浏览 0评论706个赞
1 ROS驱动……继续阅读 » robinvista 5年前 (2021-04-26) 3350浏览 0评论1559个赞
矩阵变换是机器人学的基础,所以Jungle把这一节内容划分到“工业机器人”栏目。这一节Jungle用C++设计了矩阵的类Matrix,并设计了3个方法:矩阵相加add矩阵相乘multiply求……继续阅读 » 冯Jungle 5年前 (2021-04-26) 3109浏览 0评论1315个赞
梯度的定义如下:梯度是一个方向向量,若α是函数在某点的梯度,那么函数在该点沿着α方向的变化最快那么什么是函数的增长方向?任何函数都可以用以下的表示方式表示:……继续阅读 » 猫猫虫(——) 5年前 (2021-04-26) 2776浏览 0评论615个赞
……继续阅读 » Rugels.Dix 5年前 (2021-04-26) 3257浏览 0评论1016个赞
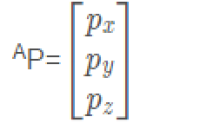
位置描述:一旦建立了坐标系,就可以用一个3×1的位置矢量对世界坐标系中的任何点进行定位。因为在世界坐标系中还有其他坐标系,因此必须在位置矢量上附加信息,表明是在哪个坐标被定义的。位置矢量用一个前置的上标来表……继续阅读 » lovely_yoshino 5年前 (2021-04-26) 3039浏览 0评论108个赞
一、前言本文的最后目的是实现Google的cartographer SLAM算法跑在Turtlebot3机器人的仿真环境上作者这样做的目的是为了横向对比三大经典SLAM算法(hector、gmapping、cartographer)<……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2724浏览 0评论1791个赞
本文讨论串联机械臂的动力学与控制问题,在加入力矩的情况下控制机器人以期望的位姿运动。以标准的puma560为例做前馈力矩控制(robotics toolbox for matlab 10.3 工具箱中的puma560对象,simulink模型,sl_fforward)。考虑……继续阅读 » unique_jie 5年前 (2021-04-26) 1732浏览 0评论1439个赞
在Jungle的上一篇博客里简单介绍了机器人位姿描述与坐标变换的基本知识(矩阵)其中关键点之一是变换算子的左乘和右乘:变换算子左乘:表示该变换是相对固定坐标系变换变换算子右乘:表示该变换是相对动的坐标系(新坐标系)变换。这一节里J……继续阅读 » 冯Jungle 5年前 (2021-04-26) 2265浏览 0评论2338个赞
近期有一个项目用到了Azure Kinect,之前Kinect 1与Kinect 2均使用过的老用户,自然不能放过这个机会。为此专门对Azure Kinect进行了学习,以下是这次自己调研摸索的一些成果……继续阅读 » lovely_yoshino 5年前 (2021-04-26) 3295浏览 0评论2457个赞
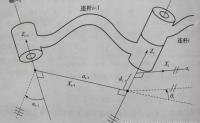
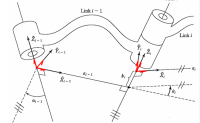
1. 建立各个连杆的坐标轴关节i的轴向方向为坐标系i的Zi轴;取Zi-1和Zi轴的公法线方向为Xi-1轴;若两个Z轴相交,则取两个Z轴的叉积方向作为X轴方向。Zi轴和Xi……继续阅读 » 冯Jungle 5年前 (2021-04-26) 3069浏览 0评论2959个赞
本人研究生关于激光SLAM的一部分工作(激光SLAM的论文有人收真的不容易,感谢机器人期刊),有条件的欢迎下载,代码其实完整性不足,之后正式发表可以开源,希望有感兴趣的同学可以一起完善。论文下载链接:基于多分辨率搜索与多点云密度匹配的快速ICP-SLAM方……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2145浏览 0评论2769个赞
我们是否可以通过计算样例分类的概率来对样例进行分类呢,即一个样例分为正例的概率为0.9,分为反例的概率为0.5,那么我们将该样例分为正例。那么我们的目标就是求P(正)和P(反)。每一个样例都是由多个属性组成的,我们根据属性的取值来计算概率……继续阅读 » 猫猫虫(——) 5年前 (2021-04-26) 2598浏览 0评论2841个赞
写在前面……继续阅读 » better_coder 5年前 (2021-04-26) 2930浏览 0评论405个赞
内容说明 : 文章内容翻译自ROS Wiki,也引用了部分《代码整洁之道》书中的内容。ROS C++代码规范与谷歌C++代码规范有诸多相似之处,本文主要讲述在编写ROS C++代码时需要遵守的编程规范。……继续阅读 » Corsair-cxs 5年前 (2021-04-26) 2382浏览 0评论132个赞
6R机器人运动学分析Jungle在https://blog.csdn.net/sinat_21107433/article/details/78937391提到了6自由度串联机器人D-H建模的方法,其实在很多文献资料里也有。但针对具体的应用,我们使用统……继续阅读 » 冯Jungle 5年前 (2021-04-26) 3365浏览 0评论431个赞
本文参考《Python神经网络编程》的相关章节上文中我们使用神经网络实现对手写数字的识别,那我们反向的给出一个标签,即给出[1, 0, 0, 0, 0, 0, 0, 0, 0, 0],从输出反向推导出输入,应该是什么样子呢?其实可以想象得……继续阅读 » 猫猫虫(——) 5年前 (2021-04-26) 1896浏览 0评论1610个赞