背景介绍目前,市面上大多数的拖动试教机器人是UR的协作机器人和DLR-KUKA的iiwa机器人,相比于UR机器人,iiwa机器人在结构上有一点重要的不同。……继续阅读 » 5年前 (2021-04-26) 3134浏览 0评论788个赞
前言在使用ROS的过程中,我们常常需要使用复杂的编译源代码和相关的解析操作,才能单独对某一个任务进行启动。在修改时,也需要单独打开某个文件、编辑、保存,这个过程比较繁琐。这些数据信息均需要在终端中以字符的方式显示出来,键入命令同样需……继续阅读 » 5年前 (2021-04-26) 3398浏览 0评论2243个赞
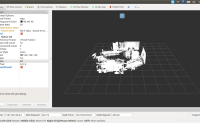
决定总结最近一个月的工作,这个月在orbslam2的基础上,使用kineticV2完成了稠密点云地图的重建,实现了点云的回环,并使用octomap转换成实时的八叉树地图,导航部分已经有了思路,打算下个月所一个基于octomap的航迹生成能用在视觉的导航上。……继续阅读 » 5年前 (2021-04-26) 2497浏览 0评论2870个赞
坐标系变换方程 如果有n个未知变换和n个变换方程,这个变换可由变换方程解出。例如:图1中变换……继续阅读 » 5年前 (2021-04-26) 2960浏览 0评论1459个赞
位置描述:一旦建立了坐标系,就可以用一个3×1的位置矢量对世界坐标系中的任何点进行定位。因为在世界坐标系中还有其他坐标系,因此必须在位置矢量上附加信息,表明是在哪个坐标被定义的。位置矢量用一个前置的上标来表……继续阅读 » 5年前 (2021-04-26) 2254浏览 0评论2385个赞
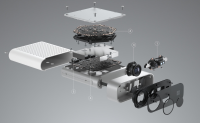
近期有一个项目用到了Azure Kinect,之前Kinect 1与Kinect 2均使用过的老用户,自然不能放过这个机会。为此专门对Azure Kinect进行了学习,以下是这次自己调研摸索的一些成果……继续阅读 » 5年前 (2021-04-26) 3666浏览 0评论2237个赞
使用octomap_server创建八叉树地图和栅格地图说明问题1:点云与网格垂直问题2:八叉树显示不完整问题3:地面……继续阅读 » 5年前 (2021-04-26) 2979浏览 0评论809个赞
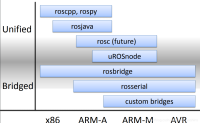
安卓与ROS通信的现状因为ROS官方支持的语言绑定只有C++和Python,所以目前安卓想与ROS通信,必须借助半官方的rosjava包,而Rosjava太重了,因为它……继续阅读 » 5年前 (2021-04-26) 2169浏览 0评论397个赞
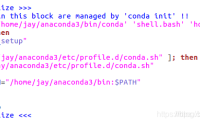
一、Anaconda与Virtualenv虚拟环境Anaconda与Virtualenv可以二选一1.1 A……继续阅读 » 5年前 (2021-04-26) 2949浏览 0评论1204个赞
<……继续阅读 » 5年前 (2021-04-26) 3799浏览 0评论2352个赞