这篇博客主要是一些调试中踩的坑及验证过的东西,以供大家参考。1.GTSAM使用篇……继续阅读 » yuanguobin01 5年前 (2021-04-26) 3500浏览 0评论1684个赞
在无人车系统(十一):轨迹跟踪模型预测控制(MPC)原理与python实现【40行代码】中介绍了MPC……继续阅读 » windSeS 5年前 (2021-04-26) 2121浏览 0评论783个赞
0x00 为何需要定点巡航现在我们已经可以在已知地图中进行自动导航了,那就可以利用这个功能来解决一些实际生活中的需求了。下面就是我思考的几个实际场景中可能用到定点巡航的功能:在工厂中经常会遇到需要……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2503浏览 0评论2995个赞
……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 3593浏览 0评论1495个赞
opencv调用yolov3模型进行深度学习目标检测,以实例进行代码详解对于yolo v3已经训练好的模型,opencv提供了加载相关文件,进行图片检测的类dnn。下面对怎么通过opencv调用yolov3模型进行目标检测方法……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 2198浏览 0评论2166个赞
出租车调度-Q learning & SARSA案例分析实验环境使用同策时序差分学习调度异策时序差分调度< ……继续阅读 » 柯南404 5年前 (2021-04-26) 1811浏览 0评论1705个赞
0x00 简要介绍在stdr仿真这个系列教程中,前面已经有八篇文章了。到现在才开始正式的指导大家如何下载前面所有的测试代码,那是因为我希望大家可以自己动手来输入各篇文章中的代码来测试学习。如果我一开始就告诉大家如何下载……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2806浏览 0评论496个赞
之前写的文章分析了全向小车运动原理和基本构型,今天尝试把它部署到 Ros 上。……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 1746浏览 0评论496个赞
car_demo|无人车仿真环境全教程最近需要在Ackerman(阿克曼)……继续阅读 » windSeS 5年前 (2021-04-26) 3627浏览 0评论2953个赞
深度Q学习原理及相关实例8. 深度Q学习8.1 经验回放8.2 目标网络8.3 相关算法8.4……继续阅读 » Stan Fu 5年前 (2021-04-26) 1811浏览 0评论1034个赞
yolo-v3模型测试及测试结果转化文章目录yolo-v3模型测试及测试结果转化1.制作2019_test.txt文件2. 修改./……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 2960浏览 0评论498个赞
已经脱更好久了,最近在金山实习,白天做公司的游戏项目,晚上做自己的课题,实在是抽不出时间。接下来几篇,我们要实现一个机械臂reach的训练,先看一下要达到的效果。……继续阅读 » bug404 5年前 (2021-04-26) 2724浏览 0评论263个赞
PID 控制是自动化控制领域应用非常广的控制方式,P 代表比例,I 代表积分,D 代表微分,从这些名词中可以看出,PID 控制是基于数学中一项重要的分支:微积分学为基础的数字化自动控制方式,它以传感器采集的数据作为输入源,按预定的 PID 参数根据特定的公式计算以后输出控制……继续阅读 » Rugels.Dix 5年前 (2021-04-26) 3432浏览 0评论2902个赞
@[toc]一、初始化特征匹配<……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 3283浏览 0评论1553个赞
前言: 之前展哥(导师)喊我在入学前做一个具有冗余腿的四足机器人用于部署XXX算法,验证XXX的i……继续阅读 » JameScottX 5年前 (2021-04-26) 3690浏览 0评论134个赞
创建Simulink环境并训练智能体水箱模型创建环境界面创建DDPG智能体训练智能体验证训练的智能体本地函数……继续阅读 » 柯南404 5年前 (2021-04-26) 3862浏览 0评论1931个赞
A. 标准层 Static Map Layer:为了做全局规划,机器人需要一个超越其传感器的地图,以了解墙壁和其他静态障碍物的位置。 静态地图可以先用SLAM算法生成,也可以从架构图中……继续阅读 » LiAr 5年前 (2021-04-26) 2046浏览 0评论2050个赞
一般来说著名的linux系统基本上分两大类:RedHat系列:Redhat、Centos、Fedora等Debian系列:Debian、Ubuntu等Red……继续阅读 » 玥茹苟 5年前 (2021-04-26) 2417浏览 0评论2229个赞
描述在使用ROS的kinetic版本控制UR机械臂时,moveit规划成功但UR机械臂不运动的问题失败表现UR机械……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 3168浏览 0评论2415个赞
准备工作安装桌面完整版ROSsu……继续阅读 » 初霁 5年前 (2021-04-26) 2505浏览 0评论2899个赞
增量学习方法背景介绍人工智能的参照样本始终没有离开人类本身。而终身式、增量式的学习能力是人类最重要的能力之一。机器人如果……继续阅读 » windSeS 5年前 (2021-04-26) 2028浏览 0评论1727个赞
创建水箱强化学习模型问题描述行动与观测奖励信号终止信号创建环境对象重置函数&nbs……继续阅读 » 柯南404 5年前 (2021-04-26) 3787浏览 0评论2646个赞
我们继续上一篇文章。上一篇已经完成了critic的设计,下面我们再来把actor完成。……继续阅读 » bug404 5年前 (2021-04-26) 2177浏览 0评论2942个赞
前言 作为一个参加了两届智能车竞赛的老车手了,总想留下一些有用的东西,前段时间刚参加完讯飞智能车的线上赛,现提供一些经验总结,以及备赛思路。ps:如果有什么不对的地方欢迎一起讨论。……继续阅读 » 雨下涵意 5年前 (2021-04-26) 3069浏览 0评论2074个赞
(《视觉SLAM十四讲》第三讲习题7)设有小萝卜一号和二号在世界坐标系中。一号位姿q1 = [0.35, 0.2, 0.3, 0.1],t1=[0.3, 0.1, 0.1]。二号位姿q2=[-0.5, 0.4, -0.1, 0.2], t2=[……继续阅读 » 玥茹苟 5年前 (2021-04-26) 2711浏览 0评论601个赞
local costmap empty using move_base_node|turtlebot_stage在我运行roslaunch turtlebot_stage turtlebot_in_stage.la……继续阅读 » windSeS 5年前 (2021-04-26) 3249浏览 0评论539个赞
描述ROS系统下,使用moveit和gazebo搭建UR机械臂控制的仿真环境,并使用C++编写一个节点来控制UR机械臂的移动ROS系统:kineticUR5机械臂电脑系统:Ubuntu16.04截……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 1947浏览 0评论2342个赞
文章目录A 路径规划定义B 构型/位型空间(configuration Space)C 障碍物与构型空间C 环境模型建立D 欧氏距离与曼哈顿……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 3666浏览 0评论1660个赞
*转载请注明出处 @梦凝小筑1.1 Cartographer 整体结构……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 3522浏览 0评论2052个赞
@[toc]1.……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2726浏览 0评论1549个赞
Qt QTreeWidget新建一个Qt Widgets Application,拖拽一个Tree Widget 到 ui 界面上,最后实现的效果如下:……继续阅读 » 玥茹苟 5年前 (2021-04-26) 3068浏览 0评论190个赞
描述机械臂末端的位姿是p时,不想沿着基坐标系来移动,而是想沿着末端的xyz轴来移动接口代码核心函数# 移动def move_……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2493浏览 0评论869个赞
NVIDIA Jetson TX2 编译并启动ttyACM模块平台: TX2 L4T 27.1系统:ubuntu 16.04传感器:hokuyo UTM-30LX laser有两个TX2,第一个连上hok……继续阅读 » windSeS 5年前 (2021-04-26) 1983浏览 0评论850个赞
Dijkstra算法Dijkstra算法是从一个节点到区域各节点的最短路径算法,解决的是最短路径问题。特点:以起点为中心,向外层层扩展,直到扩展到终点为止。……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 1795浏览 0评论387个赞
目的 对AGV循迹过程进行分析,探讨轨道对AGV性能的要求,为设计参考轨道提供指导。 AGV……继续阅读 » robinvista 5年前 (2021-04-26) 2441浏览 0评论1128个赞
Aster(A*)算法Aster算法是在Dijkstra算法基础上发展出来的,是在静态路径中用于求解最优路径有效的直接搜索算法,比dijkstra算法多了一个启发式的搜索函数,也就是通过一个代价函数来确定搜索方向(从起点开始向周围扩张,通过代价函数,计……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 3530浏览 0评论2801个赞
描述C++求解AX = XB以下的两个代码,虽然可以直接运行,但是我本人使用它们得到的手眼矩阵,旋转矩阵R值的大小看起来是合理的,但位置向量t的三个数值大概都是大于10万的,显然是错误的。但没有时间去研究错误的原因,但是……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 3149浏览 0评论1257个赞
jetson nano + ubuntu 18.04+128G TF值得一说的是,本篇同样适合jetson TX1与TX2。1.下载库……继续阅读 » windSeS 5年前 (2021-04-26) 2218浏览 0评论2845个赞
作者在读学校SUTD……继续阅读 » RedGlass 5年前 (2021-04-26) 2828浏览 0评论1348个赞
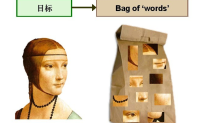
@[toc]一、词袋模型的引出<……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2509浏览 0评论587个赞
描述使用matlab求解AX=XB的问题可以正确求出X的值,我已经成功验证了至于说X具体代表什么,要结合你自己推导出的公式AX=XB之中,A、X、B分别代表什么代码main.……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2820浏览 0评论2576个赞
standard_DH 根据DH表示法确定一个一般步骤为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。如图所示表示了三个顺序关节和两个连杆,每个关节都是可以转动和平移的。第一个关节指定为关节i-1……继续阅读 » 展翅飞翔mxq 5年前 (2021-04-26) 2861浏览 0评论1536个赞
文章目录1 三维空间中的位置与姿态1.1 位置描述1.2 姿态描述2 相关函数详细用法……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 3441浏览 0评论2320个赞
RRT路径规划算法地图RRT算法原理路径平滑处理总结RRT(Rapidly-Exploring Random Tree)算法是一种……继续阅读 » unique_jie 5年前 (2021-04-26) 2291浏览 0评论1476个赞
前面两节讲完了critic、actor以及缓冲区的设计,下面就到了actor和critic的损失函数的环节了。对于神经网络来说,最重要的就是计算损失函数进行反向传播更新参数了。在计算损失函数之前,需要有batch的数据,所以上一节也把缓冲区的设计完成。这节完成损失函数的设计……继续阅读 » bug404 5年前 (2021-04-26) 3272浏览 0评论2062个赞


![[强化学习实战]出租车调度-Q learning & SARSA](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201030195932993.png#pic_center&h=123&w=200&q=90&zc=1&ct=1)