opencv调用yolov3模型进行深度学习目标检测,以实例进行代码详解
对于yolo v3已经训练好的模型,opencv提供了加载相关文件,进行图片检测的类dnn。
下面对怎么通过opencv调用yolov3模型进行目标检测方法进行详解,付源代码
1、建立相关目录
在训练结果backup文件夹下,找到模型权重文件,拷到win的工程文件夹下
在cfg文件夹下,找到模型配置文件,yolov3-voc.cfg拷到win的工程文件夹下
在data文件夹下,找到voc.names,类别标签文件,拷到win的工程文件夹下
2代码详解
weightsPath='E:\deep_learn\yolov3_modeFile\yolov3-voc_25000.weights'# 模型权重文件
configPath="E:\deep_learn\yolov3_modeFile\yolov3-voc.cfg"# 模型配置文件
labelsPath = "E:\\deep_learn\\yolov3_modeFile\\voc.names"# 模型类别标签文件引入模型的相关文件,这里需要使用yolo v3训练模型的三个文件
(1)模型权重文件 name.weights
(2)训练模型时的配置文件 yolov3-voc.cfg(一定和训练时一致,后面会提原因)
(3)模型类别的标签文件 voc.names
LABELS = open(labelsPath).read().strip().split("\n")从voc.names中得到标签的数组LABELS
我的模型识别的是车和人
voc,names文件内容
LABELS数组内容

COLORS = np.random.randint(0, 255, size=(len(LABELS), 3),dtype="uint8")#颜色 随机生成颜色框根据类别个数随机生成几个颜色 ,用来后期画矩形框
[[ 33 124 191]
[211 63 59]]
boxes = []
confidences = []
classIDs = []声明三个数组
(1)boxes 存放矩形框信息
(2)confidences 存放框的置信度
(3)classIDs 存放框的类别标签
三个数组元素一一对应,即boxes[0]、confidences[0]、classIDs[0]对应一个识别目标的信息,后期根据该信息在图片中画出识别目标的矩形框
net = cv2.dnn.readNetFromDarknet(configPath,weightsPath)加载 网络配置与训练的权重文件 构建网络
注意此处opencv2.7不行 ,没有dnn这个类,最好opencv版本在4.0以上,对应python用3.0以上版本
image = cv2.imread('E:\deep_learn\yolov3_detection_image\R1_WH_ZW_40_80_288.jpg')
(H,W) = image.shape[0:2]读入待检测的图片,得到图像的高和宽
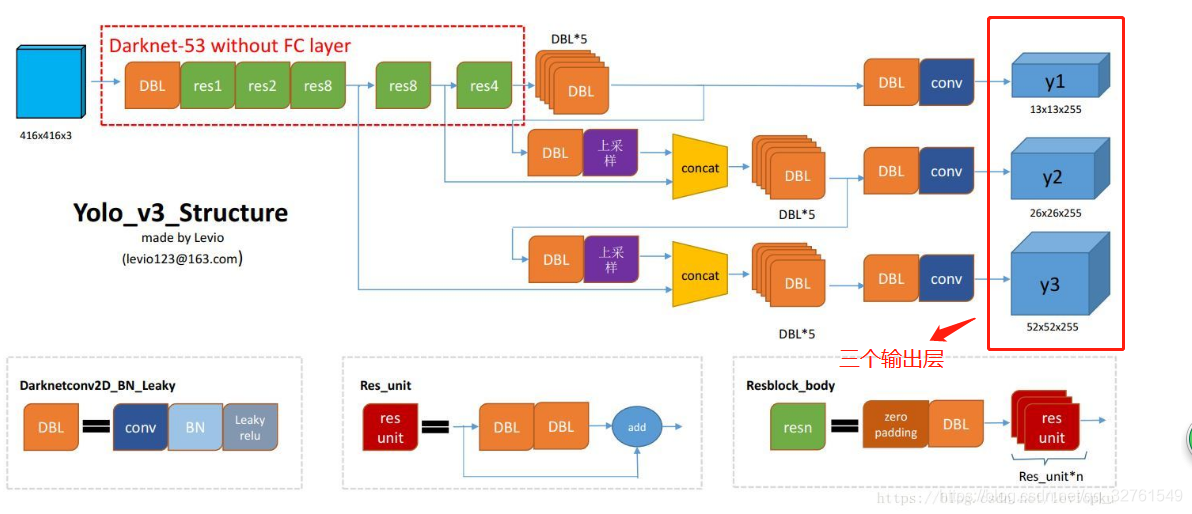
ln = net.getLayerNames()得到 YOLO各层的名称,之后从各层名称中找到输出层



可以看到yolo的各层非常多,红框圈的’yolo_94’、’yolo_106’即为输出层,下面就需要通过代码找到这三个输出层,为什么是三个?跟yolo的框架结构有关,yolo有三个输出。对应的我们在训练模型时修改 yolov3-voc.cfg文件,修改的filters、classes也是三处,详细参考
https://blog.csdn.net/qq_32761549/article/details/90020725#8_darknetcfgyolov3voccfg_183 8. 修改./darknet/cfg/yolov3-voc.cfg文件
下面就是在yolo的所有层名称ln中找出三个输出层,代码如下
out = net.getUnconnectedOutLayers()#得到未连接层得序号
x = []
for i in out: # i=[200]
x.append(ln[i[0]-1]) # i[0]-1 取out中的数字 [200][0]=200 ln(199)= 'yolo_82'
ln=xyolo的输出层是未连接层的前一个元素,通过net.getUnconnectedOutLayers()找到未连接层的序号out= [[200] /n [267] /n [400] ],循环找到所有的输出层,赋值给ln
最终ln = [‘yolo_82’, ‘yolo_94’, ‘yolo_106’]接下来就是将图像转化为输入的标准格式
blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (416, 416),swapRB=True, crop=False)用需要检测的原始图像image构造一个blob图像,对原图像进行像素归一化1 / 255.0,缩放尺寸 (416, 416),,对应训练模型时cfg的文件 交换了R与G通道
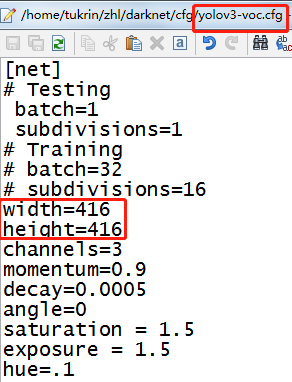
交换R与G通道通道是opencv在打开图片时交换了一次,此处交换即又换回来了
此时blob.shape=(1, 3, 416, 416),四维。
可以用numpy里的squeeze()函数把秩为1的维度去掉,然后显示图片出来看看
image_blob = np.squeeze(blob)
cv2.namedWindow('image_blob', cv2.WINDOW_NORMAL)
cv2.imshow('image_blob',np.transpose(image_blob,[1,2,0]))
cv2.waitKey(0)
net.setInput(blob) #将blob设为输入
layerOutputs = net.forward(ln) #ln此时为输出层名称 ,向前传播 得到检测结果 将blob设为输入
ln此时为输出层名称 ,向前传播 得到检测结果。
此时layerOutputs即三个输出的检测结果,
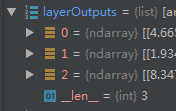
layerOutputs是一个含有三个矩阵的列表变量,三个矩阵对应三个层的检测结果,其中一层的检测结果矩阵如下图
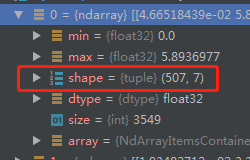
是个507*7的矩阵,这个矩阵代表着检测结果,其中507就是这层检测到了507个结果(即507个矩形框),其中7就是矩形框的信息,为什么是7呢,这里解释下,7=5+2,5是矩
形框(x,y,w,h,c)2是2个类别分别的置信度(class0、class1). 所以每一行代表一个检测结果。
接下来就是对检测结果进行处理与显示
在检测结果中会有很多每个类的置信度为0的矩形框,要把这些与置信度较低的框去掉
#接下来就是对检测结果进行处理
for output in layerOutputs: #对三个输出层 循环
for detection in output: #对每个输出层中的每个检测框循环
scores=detection[5:] #detection=[x,y,h,w,c,class1,class2]
classID = np.argmax(scores)#np.argmax反馈最大值的索引
confidence = scores[classID]
if confidence >0.5:#过滤掉那些置信度较小的检测结果
box = detection[0:4] * np.array([W, H, W, H])
(centerX, centerY, width, height)= box.astype("int")
# 边框的左上角
x = int(centerX - (width / 2))
y = int(centerY - (height / 2))
# 更新检测出来的框
boxes.append([x, y, int(width), int(height)])
confidences.append(float(confidence))
classIDs.append(classID)现在就将网络的检测结果提取了出来,框、置信度、类别。
可以先画一下看下效果
a=0
for box in boxes:#将每个框画出来
a=a+1
(x,y)=(box[0],box[1])#框左上角
(w,h)=(box[2],box[3])#框宽高
if classIDs[a-1]==0: #根据类别设定框的颜色
color = [0,0,255]
else:
color = [0, 255, 0]
cv2.rectangle(image, (x, y), (x + w, y + h), color, 2) #画框
text = "{}: {:.4f}".format(LABELS[classIDs[a-1]], confidences[a-1])
cv2.putText(image, text, (x, y - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.3, color, 1)#写字
cv2.namedWindow('Image', cv2.WINDOW_NORMAL)
cv2.imshow("Image", image)
cv2.waitKey(0)
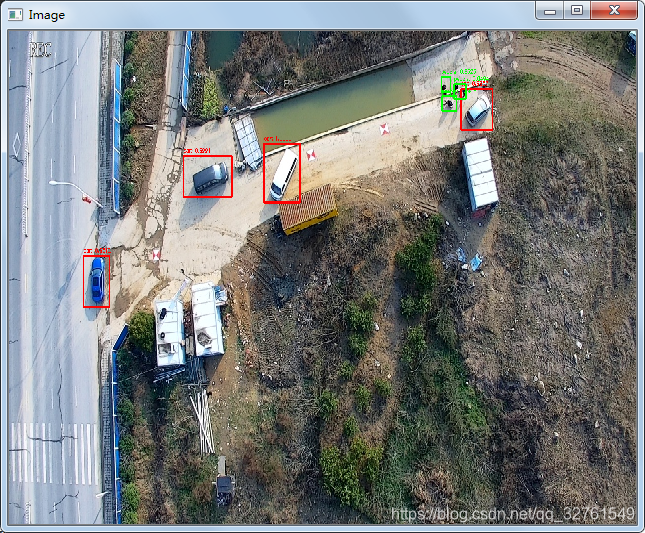
结果:

可以看到对于同一目标有几个矩形框,这需要对框进行非极大值抑制处理。
进行非极大值抑制的操作,opencv的dnn有个直接的函数
NMSBoxes(bboxes, scores, score_threshold, nms_threshold, eta=None, top_k=None)
bboxes需要操作的各矩形框对应咱程序的boxes
scores矩形框对应的置信度对应咱程序的confidences
score_threshold置信度的阈值,低于这个阈值的框直接删除
nms_threshold nms的阈值
非极大值的原理没有理解的话,里面的参数不好设置。
下面简单说下非极大值抑制的原理
1)先对输入检测框按置信度由高到低排序
2)挑选第一个检测框(即最高置信度,记为A)和其它检测框(记为B)进行iou计算
3)如果iou大于nmsThreshold, 那就将B清除掉
4)跳转到2)从剩余得框集里面找置信度最大得框和其它框分别计算iou
5)直到所有框都过滤完
NMSBoxes()函数返回值为最终剩下的按置信度由高到低的矩形框的序列号
进行非极大值抑制后,显示部分代码改一部分即可。直接给出代码
idxs=cv2.dnn.NMSBoxes(boxes, confidences, 0.2,0.3)
box_seq = idxs.flatten()#[ 2 9 7 10 6 5 4]
if len(idxs)>0:
for seq in box_seq:
(x, y) = (boxes[seq][0], boxes[seq][1]) # 框左上角
(w, h) = (boxes[seq][2], boxes[seq][3]) # 框宽高
if classIDs[seq]==0: #根据类别设定框的颜色
color = [0,0,255]
else:
color = [0,255,0]
cv2.rectangle(image, (x, y), (x + w, y + h), color, 2) # 画框
text = "{}: {:.4f}".format(LABELS[classIDs[seq]], confidences[seq])
cv2.putText(image, text, (x, y - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.3, color, 1) # 写字
cv2.namedWindow('Image', cv2.WINDOW_NORMAL)
cv2.imshow("Image", image)
cv2.waitKey(0)最终的检测结果
至此及用opencv加载yolo v3的模型,进行了一次图片的检测。
3、附源代码
#coding:utf-8
import numpy as np
import cv2
import os
weightsPath='E:\deep_learn\yolov3_modeFile\yolov3-voc_25000.weights'# 模型权重文件
configPath="E:\deep_learn\yolov3_modeFile\yolov3-voc.cfg"# 模型配置文件
labelsPath = "E:\\deep_learn\\yolov3_modeFile\\voc.names"# 模型类别标签文件
#初始化一些参数
LABELS = open(labelsPath).read().strip().split("\n")
boxes = []
confidences = []
classIDs = []
#加载 网络配置与训练的权重文件 构建网络
net = cv2.dnn.readNetFromDarknet(configPath,weightsPath)
#读入待检测的图像
image = cv2.imread('E:\deep_learn\yolov3_detection_image\R1_WH_ZW_40_80_288.jpg')
#得到图像的高和宽
(H,W) = image.shape[0:2]
# 得到 YOLO需要的输出层
ln = net.getLayerNames()
out = net.getUnconnectedOutLayers()#得到未连接层得序号 [[200] /n [267] /n [400] ]
x = []
for i in out: # 1=[200]
x.append(ln[i[0]-1]) # i[0]-1 取out中的数字 [200][0]=200 ln(199)= 'yolo_82'
ln=x
# ln = ['yolo_82', 'yolo_94', 'yolo_106'] 得到 YOLO需要的输出层
#从输入图像构造一个blob,然后通过加载的模型,给我们提供边界框和相关概率
#blobFromImage(image, scalefactor=None, size=None, mean=None, swapRB=None, crop=None, ddepth=None)
blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (416, 416),swapRB=True, crop=False)#构造了一个blob图像,对原图像进行了图像的归一化,缩放了尺寸 ,对应训练模型
net.setInput(blob) #将blob设为输入??? 具体作用还不是很清楚
layerOutputs = net.forward(ln) #ln此时为输出层名称 ,向前传播 得到检测结果
for output in layerOutputs: #对三个输出层 循环
for detection in output: #对每个输出层中的每个检测框循环
scores=detection[5:] #detection=[x,y,h,w,c,class1,class2] scores取第6位至最后
classID = np.argmax(scores)#np.argmax反馈最大值的索引
confidence = scores[classID]
if confidence >0.5:#过滤掉那些置信度较小的检测结果
box = detection[0:4] * np.array([W, H, W, H])
#print(box)
(centerX, centerY, width, height)= box.astype("int")
# 边框的左上角
x = int(centerX - (width / 2))
y = int(centerY - (height / 2))
# 更新检测出来的框
boxes.append([x, y, int(width), int(height)])
confidences.append(float(confidence))
classIDs.append(classID)
idxs=cv2.dnn.NMSBoxes(boxes, confidences, 0.2,0.3)
box_seq = idxs.flatten()#[ 2 9 7 10 6 5 4]
if len(idxs)>0:
for seq in box_seq:
(x, y) = (boxes[seq][0], boxes[seq][1]) # 框左上角
(w, h) = (boxes[seq][2], boxes[seq][3]) # 框宽高
if classIDs[seq]==0: #根据类别设定框的颜色
color = [0,0,255]
else:
color = [0,255,0]
cv2.rectangle(image, (x, y), (x + w, y + h), color, 2) # 画框
text = "{}: {:.4f}".format(LABELS[classIDs[seq]], confidences[seq])
cv2.putText(image, text, (x, y - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.3, color, 1) # 写字
cv2.namedWindow('Image', cv2.WINDOW_NORMAL)
cv2.imshow("Image", image)
cv2.waitKey(0)



