基于ROS-Serial和Arduino实现控制六轴舵机机械臂 &……继续阅读 » Rugels.Dix 5年前 (2021-04-26) 2619浏览 0评论195个赞
Hi 小伙伴们,古月居新版本上线啦!本次大幅改版完善了界面的优化,并增加了一些新功能,小编已经迫不及待想和你们分享了~ ……继续阅读 » 古月居官方 5年前 (2021-04-26) 3508浏览 0评论729个赞
描述 使用贝塞尔曲线生成路径 已知:若干个二维路径点(x, y),生成一段由一系列(x, y)点组成的点集 公式 网上有很多贝塞尔曲线的概念和知识,这里不做赘述 ……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2347浏览 0评论394个赞
参考:ros::NodeHandle::advertiseServ……继续阅读 » bbtang5568 5年前 (2021-04-26) 2908浏览 0评论1107个赞
上一篇文章我们强力推导了GAN的数学公式,它就是: ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2613浏览 0评论2845个赞
0x00 What’s STDR Simulator? ……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2867浏览 0评论1941个赞
Arduino智能小车系列教程5——蓝牙小车 Arduino智能小车系列教程 < ……继续阅读 » 懒小象 5年前 (2021-04-26) 3322浏览 0评论1477个赞
检测或者训练有问题的可发邮件咨询小编,小编尽力解答1039463596@qq.com 好吧,正式开始跑程序(其实官网都有) 这篇文章是训练YOLO v2过程中的经验总结,我使用YOLO v2训练一组自己的数据,训练后的model,在阈值为.25的情况下,Recall值是95.54……继续阅读 » xiaorun 5年前 (2021-04-26) 1860浏览 0评论2222个赞
大概流程走完,其实还是有点懵逼的,下面就官方文档,讨论下细节,要是我自己没注意到的点。 Validate your bag 如果是准备跑自己的或者别人的bag包,这一步是很有必要的,可以从中获得相关消息的topic和frame_id,这个在填写lua文……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2534浏览 0评论129个赞
Arduino智能小车系列教程6——循迹小车 Arduino智能小车系列教程 ……继续阅读 » 懒小象 5年前 (2021-04-26) 2115浏览 0评论1036个赞
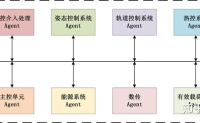
前言 上一篇文章 “多机器人协同控制①——仿真……继续阅读 » 小黑鸭 5年前 (2021-04-26) 1641浏览 0评论1256个赞
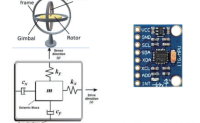
目录 一、VIO(Visual-Inertial Odometry)概述……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 1769浏览 0评论2646个赞
写在前面 上一节我们简单讨论了在生成点云的过程中的矩阵变换。如果大家看本章有点懵逼的话,不妨先看一下我上节写的内容。 我们本节将基于激光雷达与矩阵变换关系,将激光雷达的LaserScan数据转……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3373浏览 0评论1370个赞
Arduino智能小车系列教程7——小车测速 Arduino智能小车系列教程 ……继续阅读 » 懒小象 5年前 (2021-04-26) 1620浏览 0评论2654个赞
webots版本:2021aros版本:noetic……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3308浏览 0评论2189个赞
1. 引言 1.……继续阅读 » hitgavin 5年前 (2021-04-26) 3428浏览 0评论949个赞
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为两步: 1、路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 3200浏览 0评论2798个赞
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路: 思路一:把这些”期望“加入到优化问题中。 思路二:调整时间分配,来避免……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2395浏览 0评论2859个赞
前几日有学弟问我,ros如何跟下位机通信呢? ……继续阅读 » nidie508 5年前 (2021-04-26) 3172浏览 0评论1412个赞
汇总 ……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2172浏览 0评论2257个赞
汇总 ……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3292浏览 0评论685个赞
在自动驾驶领域,激光里程计和建图(LOAM)已经起到重要的作用,归因于它可以在定位机器人的位姿的同时建立周围环境的高精度、高分辨率的地图。 ……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3207浏览 0评论1117个赞
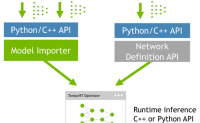
参考:https://arleyzhang.github.io/articles/7f4b25ce/ 1 什么是TensorRT 一般的深度学习项目,训练时为了加快速度,会使用多GPU分布式训练。但在部署推理时,为了降低成本,往往使……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2202浏览 0评论2759个赞
目录 1. 工业机器人简介2. 国外机器人供应商2.1瑞典 ABB2.2 日本安川电机2.3 日本FANUC2.4 德国KUKA……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 3282浏览 0评论1086个赞
利用python打开摄像头及颜色检测 最近两周由于忙于个人项目,一直未发言了,实在是太荒凉了。。。。,上周由于项目,见到Python的应用极为广泛,用起来也特别顺手,于是小编也开始着手学习Python,…下面我就汇报下今天的学习成果吧 ……继续阅读 » xiaorun 5年前 (2021-04-26) 2944浏览 0评论1767个赞
A*算法原理 A算法是一种经典的路径搜索算法,A算法的原理初学者可以去网上搜索算法原理详解,讲得很好链接:http://www.gamedev.net/reference/articles/article2003.a……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2736浏览 0评论2331个赞
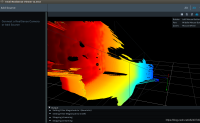
今天来学习一下英特尔D435深度传感器的相关内容: 首先,我们找到D435官网:https://www.intelrealsense.com/developers/ 我们打开一个终端,按照官网提示输入以下内容: 1)在软……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2788浏览 0评论306个赞
0x00 什么是仿真实验 在没有真实物理实体实验设备的情况下,通过在计算机上用软件模拟真实设备运行的效果,这就叫做软件仿真实验,用软……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2910浏览 0评论635个赞
……继续阅读 » 长风弦歌 5年前 (2021-04-26) 4743浏览 0评论2005个赞
飞思卡尔智能车—电磁循迹(节能组) 详细参赛要求请以智能车官方为准,此文章仅分享本人参赛经验,开源硬件电路设计,供大家学习! 电磁循迹部分设计思路:电感采集电磁信号,放……继续阅读 » 鲁棒最小二乘支持向量机 5年前 (2021-04-26) 2421浏览 0评论614个赞
在上一篇中对 LOAM-Livox 算法做了整体的总结。 最后给出了 算法的整体框图 如下: ……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 2278浏览 0评论245个赞
在很多商用机器人中都涉及到机器人与外部设备(比如APP)之间的交互。而在交互中,最为首要的就是地图与机器人位置的交互了。在这一个章节中,我们介绍一个机器人将内部的地图,机器人位置等数据与用户端进行同步的案例。 1. 实际场景与机器人(ROS)地图的对应关系……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3223浏览 0评论1380个赞
……继续阅读 » 长风弦歌 5年前 (2021-04-26) 3153浏览 0评论2231个赞
第一次编程操作UR10协作机器人的记录 1 引言 UR机器人参考:丹麦优傲机器人 ……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 2475浏览 0评论2755个赞
路径规划算法总结 目录1 自主机器人近距离操作运动规划体系········1.1 单个自主机器人的规划体系········1.2 多自主机器人协同规划体系2 路径……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 3403浏览 0评论1950个赞
在我们平常在做目标检测或者目标追踪时,经常要画出目标的运动轨迹图,基本大致思路如下,检测出目标,建立一个空的队列,检测出目标就将目标的中心点给加到队列中。最后写一个循环,调用opencv cv2.line函数画出上一帧与这一帧的轨迹图,我们线看下效果吧(小编不上相) ……继续阅读 » xiaorun 5年前 (2021-04-26) 2941浏览 0评论728个赞
机器人学中经典教材 《Introduction to Robotics: Mechanics and Control》,也就是John Craig的中文版《机器人学导论》,刚来实验室的时候,就发现师兄们人手一本了,某些章节自己啃也是有点难度的,之 前在 ……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3378浏览 0评论2427个赞
参考:https://github.com/jkjung-avt/tf_trt_models/tree/tf-1.8 在……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 1710浏览 0评论1053个赞
描述关于A_算法的一些实现,……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2671浏览 0评论419个赞
1 概述 UR机器人作为目前使用广泛的协作机器人,其开放了基于TCP/IP的远程控制功能,提供了多个多类型的端口,用于工业总线控制,或者用户自行编程控制,以下记录整理此方面的信息。 2 UR机器人通信2.1 ……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 2698浏览 0评论772个赞
此示例演示了如何在高速公路驾驶场景中规划局部轨迹。 本示例使用参考路径和障碍物动态列表来生成自我车辆的替代轨迹。 自我车辆从DrivingScenario对象浏览提供的驾驶场景中定义的交通。 车辆会根据成本,可行性和无碰撞运动在自适应巡航控制,车道变更和车辆跟随操纵之间进行……继续阅读 » 柯南404 5年前 (2021-04-26) 2739浏览 0评论397个赞
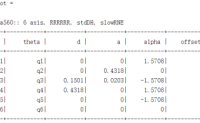
正运动学解 ……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2563浏览 0评论2706个赞
最近nvidia官网发布了专门针对tx2的tensorflow-gpu安装包,这样将TX2上部署tensorflow的难度大大降低,只需几个步骤即可。 1 刷机jetpack3.3首先TX2必须是3……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2843浏览 0评论2734个赞
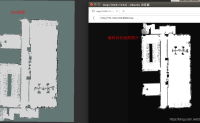
第4节我们说到ROS与APP之间的地图交互与坐标系变换,今天我们来实现一个与ROS地图对接的APP,实现以下功能: 1)机器人的ROS地图能够通过网络方式传输到APP上,同时APP上能显示机器人位置 2)使用者绘制APP中地图上的某个区域,这个点能在R……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3013浏览 0评论700个赞
目录1. 全球机器人四……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 1809浏览 0评论259个赞