ros_arduino_brige功能包使用和安装这里就不多说了,详情点击 先看一下ros_arduino_b……继续阅读 » 十啵 5年前 (2021-04-26) 3041浏览 0评论205个赞
以小海龟运动仿真为例: ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2823浏览 0评论1931个赞
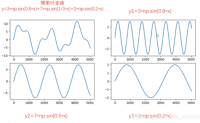
一、设计功能 录制音频,保存音频对录制的语音信号进行频谱分析,确定该段语音的主要频率范围;……继续阅读 » 挽风 5年前 (2021-04-26) 2222浏览 0评论1494个赞
URDF文件通过check_urdf pan_tilt.urdf检测是正确的: robot name is: pan_tilt---------- Success……继续阅读 » bbtang5568 5年前 (2021-04-26) 1949浏览 0评论102个赞
ROS常用命令: ……继续阅读 » 小小何先生 5年前 (2021-04-26) 3315浏览 0评论719个赞
本篇将会对四足机器人的俯仰角进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 一、数学建模 ……继续阅读 » 我是。 5年前 (2021-04-26) 3278浏览 0评论1593个赞
要建立自己的自主机器人,首先,必须要建立自己的机器人模型,URDF(Unified Robot Description Format)模型。 ……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1762浏览 0评论1245个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2266浏览 0评论253个赞
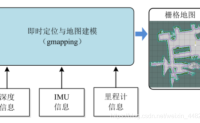
gmapping功能包集成了Rao-Blackwellized粒子滤波算法,为开发者隐去了复杂的内部实现。下图所示的是gmapping功能包的总体框架。 ……继续阅读 » 十啵 5年前 (2021-04-26) 3207浏览 0评论2588个赞
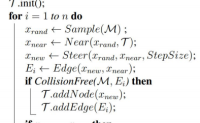
前言 在环境感知与规划专题(一)——A*算法入门一……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2250浏览 0评论2626个赞
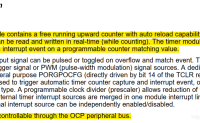
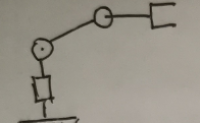
之前的博客为了实现延时特定时间(4ms)并在这段时间内产生PWM波形,使用了两种方法,第一种通过计数的方式,比较low;第二种使用PRU的工业级定时器IEP,时钟频率200MHZ,使用也很简单。 但是随着实验的进行,因为是六自由度的机械臂,计划使用三块beagleb……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2044浏览 0评论101个赞
前面一篇文章我们介绍了怎么在win10下搭建Yolo v3的开发环境。 ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3540浏览 0评论1168个赞
本文我们分别用SDH法和MDH来给同一个机器人模型建模,感受一下两种建模方法在串联机械臂里面的应用。 所用平台:Matlab 本文重点是建系以及提取DH参数表的过程 想要运行程序只需要把所有代码复制粘贴进matlab运行即可 1. 机器人结构……继续阅读 » chuchu 5年前 (2021-04-26) 2269浏览 0评论2866个赞
hector_slam功能包使用高斯牛顿方法,不需要里程计数据,只根据激光信息便可构建地图。 所以他的总体框架如下: ……继续阅读 » 十啵 5年前 (2021-04-26) 1629浏览 0评论2761个赞
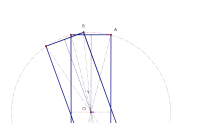
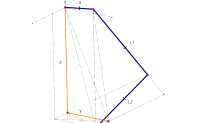
本篇将会三维空间中,对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 首先,我们来看三维空间中简图: ……继续阅读 » 我是。 5年前 (2021-04-26) 1971浏览 0评论2388个赞
笛卡尔运动规划Python接口https://blog.csdn.net/qq_32618327/article/details/999669……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3846浏览 0评论1705个赞
1 异常报警:package ‘orocos-bfl’ not found: -- Found PkgConfig: /usr/bin/pkg-config (fou……继续阅读 » bbtang5568 5年前 (2021-04-26) 2065浏览 0评论2920个赞
主要知识点: 1.src、build、devel、install各文件夹的功能介绍。 2.创建工作空间(创建文件夹,初始化工作空间)、编译工作空间、设置环境变量,检查环境变量 (echo $ROS_PACKAGE_PATH) 3.创建功能包:cat……继续阅读 » 小小何先生 5年前 (2021-04-26) 2145浏览 0评论1104个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1974浏览 0评论1506个赞
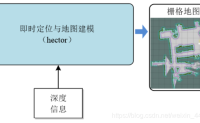
2016年10月5日,谷歌宣布开放一个名为cartographer的即时定位与地图建模库,开发人员可以使用该库实现机器人在二维或三维条件下的定位及建图功能。cartograhper的设计目的是在计算资源有限的情况下,实时获取相对较高精度的2D地图。考虑到基于模拟策略的粒子滤波方法……继续阅读 » 十啵 5年前 (2021-04-26) 1807浏览 0评论2028个赞
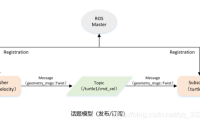
话题模型 ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2779浏览 0评论803个赞
从正面观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的滚转角调节 一、几何模型 ……继续阅读 » 我是。 5年前 (2021-04-26) 3312浏览 0评论2918个赞
视觉抓取中非常重要的一个部分就是对抓取物体的识别,无论是二维图像还是三维点云,在ROS中都可以找到对应的功能包,https://blog.c……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2661浏览 0评论908个赞
写在前面 上一小节我们介绍了机器人的舵机驱动与串口通讯的原理。到目前为止,我们已经完成了: 机器人编码器和轮胎的驱动机器人头部舵机的驱动< ……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2341浏览 0评论2090个赞
1.首先 ……继续阅读 » Eragonl 5年前 (2021-04-26) 3634浏览 0评论2510个赞
开头 ……继续阅读 » Eragonl 5年前 (2021-04-26) 1763浏览 0评论2832个赞
ROS-moveit!探索(4)webots和m……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3025浏览 0评论1467个赞
ROS-moveit!探索(3)webots和movei……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2114浏览 0评论609个赞
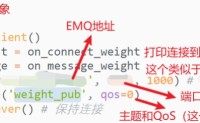
这个是我用来看EMQ服务器里面数据的工具,MQTTX,挺好……继续阅读 » better_coder 5年前 (2021-04-26) 3181浏览 0评论2218个赞
一、前言 “纸上得来终觉浅,绝知此事要躬行”。ROS真的有一定难度,只让它“跑”起来就得记很多的指令,看很多的文档,更别说研究它了。这个测试很早……继续阅读 » 两钞票 5年前 (2021-04-26) 3456浏览 0评论968个赞
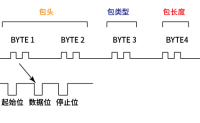
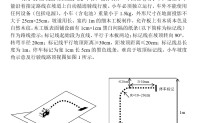
写在前面 2020年电赛结束了,因为疫情的原因,今年的电赛也推迟了,所以我先参加了智能车竞赛再参加的电子设计竞赛。准备时间不是很充分,就准备了一个国庆的时间,因此我们准备的小车就是智能车的舵机和电机,为了符合比赛要求,底板是我们重新打的,然后……继续阅读 » better_coder 5年前 (2021-04-26) 2241浏览 0评论877个赞
首先 ……继续阅读 » Eragonl 5年前 (2021-04-26) 3015浏览 0评论2646个赞
首先 ……继续阅读 » Eragonl 5年前 (2021-04-26) 2864浏览 0评论2348个赞
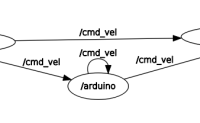
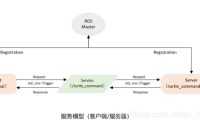
在ROS Master的管理之下有client和server两个节点,下面要实现的是server端,server端用来给海龟发送速度的指令,通过topic来发,service功能是以client端发布request控制server是不是要给海龟发速度指令,client端是海龟运动……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 1952浏览 0评论2996个赞
前言: 今年很荣幸的参加了首届高等教育创意机器人大赛的主题二,机械手解魔方这个项目,此次比赛可以说收获颇丰。见识到了其他高校的机械手系统,可以说是仰慕不已,当然了绝大多数,还是比较传统的,在此只讨论视觉采集的方案,随后介绍我们的视觉方案。 ……继续阅读 » JameScottX 5年前 (2021-04-26) 2630浏览 0评论2896个赞
引言 进行图像的分割的方式有很多种,这里我们主要要介绍的是一种叫做分水岭(Watershed)的算法。 ……继续阅读 » Eragonl 5年前 (2021-04-26) 2504浏览 0评论2552个赞
1.话题编程 ……继续阅读 » 小小何先生 5年前 (2021-04-26) 2572浏览 0评论604个赞
在建立好自己的机器人模型后, 我们可以利用turtlebot的ROS库,实现自己机器人的自主导航. ……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 2735浏览 0评论440个赞
目录: 一、IMDb电影评论数据预处理 二、词袋模型应用 三、文本数据清洗 四、模型训练:逻辑回归 五、核外学习:大规模数据应用 六、潜在狄氏分配(LDA)主题建模 首先祝各位读者朋友新春快乐,牛年大吉,学习工作顺利!……继续阅读 » Charzous 5年前 (2021-04-26) 2593浏览 0评论590个赞
好久不见朋友们,首先祝大家新年好呀!新的一年,祝大家牛年大吉,万事如意,bug少点,笑容多点!!! ……继续阅读 » nidie508 5年前 (2021-04-26) 3204浏览 0评论2438个赞
对于串联机器人来说,求逆解的难度要大于求正解,市面上的工业机器人一般是利用的是利用解析法求封闭解,机器人有封闭解是有条件的—Pieper法则。另一种求逆解的方法是利用迭代法求数值解,适用于不满足Pieper法则的构型,……继续阅读 » gpeng832 5年前 (2021-04-26) 1651浏览 0评论2007个赞
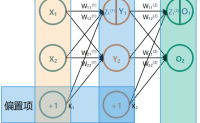
本文有一部分内容参考以下两篇文章: 一文弄懂神经网络中的反向传播法——BackPropagation ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2387浏览 0评论2433个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1897浏览 0评论2014个赞
从正上方观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的偏航调节 一、几何模型 以右前腿为例 ……继续阅读 » 我是。 5年前 (2021-04-26) 3312浏览 0评论2110个赞
每当我们需要运行一个ROS节点或工具时,都需要打开一个新的终端运行一个命令。当系统中的节点数量不断增加时,“每个节点一个终端”的模式会变得非常麻烦。那么有没有一种方式可以一次性启动所有节点呢?答案当然是肯定的。 这里我引用古月的书上的内容给大家详细介绍一下。 &nb……继续阅读 » 十啵 5年前 (2021-04-26) 1857浏览 0评论2119个赞




![[ros2学习]-CLI Tools – 了解ROS 2服务(service)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200402161210734.gif#pic_center&h=123&w=200&q=90&zc=1&ct=1)







![[OpenCV]经典霍夫变换原理](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210207_17802.gif&h=123&w=200&q=90&zc=1&ct=1)
![ROS-moveit!探索(4)webots和moveit联合控制[2]](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210210_77079.jpg&h=123&w=200&q=90&zc=1&ct=1)


![[OpenCV]时间中值滤波](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210209_52249.png&h=123&w=200&q=90&zc=1&ct=1)
![[OpenCV]特征对齐](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210211_96404.png&h=123&w=200&q=90&zc=1&ct=1)
![[OpenCV]Watershed算法进行图形分割](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210212_78947.jpg&h=123&w=200&q=90&zc=1&ct=1)