一、前言
本文的最后目的是实现Google的cartographer SLAM算法跑在Turtlebot3机器人的仿真环境上
作者这样做的目的是为了横向对比三大经典SLAM算法(hector、gmapping、cartographer)
本文主要内容:
turtlebot3环境搭建
在Turtlebot3上的仿真环境跑cartographer建图算法
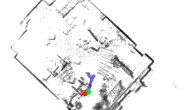
二、先直接上结果
就上一个视频截图吧,gazebo是真的强大,在Turtlebot3上跑cartographer建图算法
")
三、Turtlebot3环境搭建
这个直接跟创客智造的教程,应该没有坑
https://www.ncnynl.com/archives/201707/1788.html
四、在Turtlebot3上的仿真环境跑cartographer建图算法
1.(先排一个坑)修改turtlebot3_cartographer.launch
该launch文件在目录
Robot_Turtlebot3/src/turtlebot3/turtlebot3_slam/launch
修改lua配置文件
")
2.启动仿真地图
echo "export TURTLEBOT3_MODEL=burger" >> ~/.bashrc
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch
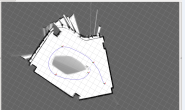
3.给地图添加一个HOUSE
")
4.启动键盘控制小车
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
5.运行slam算法
#运行cartographer算法
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=cartographer
#运行hector算法
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=hector
#运行gmapping算法
roslaunch turtlebot3_slam turtlebot3_slam.launch
这是本人在CSDN 上的第一篇文章,为了实现这个目的,前前后后一共花了好几天时间,用了无数种环境搭建的教程,踩了很多坑,最后发现其实也没那么难
在这里把整个过程记录下,一个是方便自己以后查阅,还一个是让有同样目的的读者少走弯路!有问题可以留言