运行 Cartographer的配置参数比较重要,稍微不注意就会报错,例如一个常见的错误类型: [ERROR] [1602741280.449037435, 153.231000000]: Ignoring transform from……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2461浏览 0评论1711个赞
这里放了一个小强机器人的bag和我自己的bag包,以供大家测试。 链接:https://pan.baidu.com/s/1GF5FNFIKiRV3wbmBH3HwWQ 提取码:668d 前提: 1.需要三维激光启动节点,发布/points……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 1804浏览 0评论1164个赞
首先,根据不同的雷达,了解雷达发布的点云消息。(IMU也是一样,了解IMU发布的点云topic)。 本文使用的是Robosense 16线激光雷达,暂时未使用IMU(建议6轴,再加上GPS定位精度会高很多)发布PointCloud2类型的消息默认的topic为rslidar_po……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3541浏览 0评论2853个赞
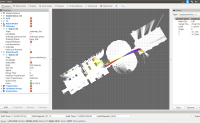
大概流程走完,其实还是有点懵逼的,下面就官方文档,讨论下细节,要是我自己没注意到的点。 Validate your bag 如果是准备跑自己的或者别人的bag包,这一步是很有必要的,可以从中获得相关消息的topic和frame_id,这个在填写lua文……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2133浏览 0评论2564个赞
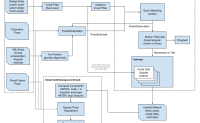
*转载请注明出处 @梦凝小筑1.1 Cartographer 整体结构……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2795浏览 0评论305个赞
本人为了对比研究三大经典SLAM算法(Gmapping、Cartographer、Hector)的优缺因此考虑在Turtlebot3仿真环境下对这三个SLAM算法进行测试。没想到测试第一个算法(Google的cartographer)就花……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 3032浏览 0评论2512个赞
一、前言该篇为本文的重点,主要内容为cartographer_turtlrbot3源码库的安装二、cartographer_turtlebot源码库安装这里基本参考创客智造的安装教程,但是由于教……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 1982浏览 0评论2006个赞
……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 3029浏览 0评论1475个赞
一、前言本文的最后目的是实现Google的cartographer SLAM算法跑在Turtlebot3机器人的仿真环境上作者这样做的目的是为了横向对比三大经典SLAM算法(hector、gmapping、cartographer)<……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 1852浏览 0评论846个赞
*转载请注明出处 @梦凝小筑1.2 Cartographer 源码软件结构 Cartographer 的源码中,主要有两大部分:&n……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 3449浏览 0评论636个赞
本文前言 *转载请注明出处 @梦凝小筑 本人的研究方向为激光SLAM,因此对于Google Cartographer 的经典算法十分感兴趣,但是苦于该算法的论文是英文写作,且该论文有着公式多,解释少的特点。因此在看了原论文和……继续阅读 » 梦凝小筑 5年前 (2021-04-26) 2111浏览 0评论853个赞