工作空间 工作空间(workspace)是一个存放工程开发相关文件的文件夹 src:代码空间(Source Space)build: 编译空间(Build Space……继续阅读 » nidie508 5年前 (2021-04-26) 2182浏览 0评论2575个赞
此篇对做此项目过程中遇到的所有问题和出现的BUG(包括硬件方面和软件方面)进行总结,告诫自己要养成总结问题,汇总BUG的好习惯。前人说:工作后你会发现你学生阶段所做项目的BUG_list价值千金!……继续阅读 » jiaolu295 5年前 (2021-04-26) 3114浏览 0评论1107个赞
前记: 之前学习了很多关于ROS的知识,现在想自己制作一个四轴器械臂来练练手。所以就定为arm0.1版本,使用MG90s舵机来搭建一个四轴机械臂。arm0.1版本的目标是对不同颜色的方块进行分类并在Gazebo中模拟出来。 ……继续阅读 » Stan Fu 5年前 (2021-04-26) 3385浏览 0评论989个赞
事先准备 使用工具Python3.5 使用包cv2,numpy 涉及函数 cv2.cvtColor() cv2.inRange() 任务1:转换颜色空间 ……继续阅读 » Eragonl 5年前 (2021-04-26) 1977浏览 0评论451个赞
文章目录 patch原理patch函数实例……继续阅读 » 懒小象 5年前 (2021-04-26) 1671浏览 0评论929个赞
参考图书: web3.0与Semantic Web编程(中文版) ……继续阅读 » 喵木木 5年前 (2021-04-26) 1885浏览 0评论2782个赞
【从零开始的ROS四轴机械臂控制(二)】 四、urdf文件及gazebo仿真……继续阅读 » Stan Fu 5年前 (2021-04-26) 2928浏览 0评论2230个赞
前言 暑假闲着也是闲着,想着还是干点有意义的事情充实一下自己,那会也在再学习C语言,就想找点能锻炼锻炼编程能力的小项目,正好逛论坛看到了别人做的智能小车,看着还挺好玩就想着自己也做一个,一方面能锻炼锻炼自己的编程能力,……继续阅读 » jiaolu295 5年前 (2021-04-26) 2493浏览 0评论1448个赞
不考虑横向运动时,我们可以把四足机器人的腿部简单看成一个二连杆结构,这节我们就来讲解如何调整离地高度的问题 一、几何模型 我们可以把机器人的一条腿简化成以下形状,由两根连杆组成,……继续阅读 » 我是。 5年前 (2021-04-26) 2924浏览 0评论1187个赞
实现在海龟仿真器下通过程序控制从而达到海龟的移动 1.创建功能包 和上篇博客创建相类似,在src文件下建立功能包 ……继续阅读 » nidie508 5年前 (2021-04-26) 3145浏览 0评论1228个赞
本文主要通俗介绍了数字图像基础概念、图像处理技术划分、技术起源及应用场景、成像技术等 引言 什么是数字图像呢? 数字图像:一幅图像可以定义为一个二维函……继续阅读 » 小小何先生 5年前 (2021-04-26) 2682浏览 0评论2949个赞
……继续阅读 » chuchu 5年前 (2021-04-26) 2290浏览 0评论1694个赞
文章目录 一、准备工作1、pybullet2、mini cheetah 的模型……继续阅读 » 我是。 5年前 (2021-04-26) 2507浏览 0评论2512个赞
涉及函数: cv2.getPerspectiveTransform() cv2.warpAffine() cv2.warpPersperctive() ……继续阅读 » Eragonl 5年前 (2021-04-26) 1971浏览 0评论127个赞
【从零开始的ROS四轴机械臂控制(三)】五、在gazebo中添加摄像头1.修改……继续阅读 » Stan Fu 5年前 (2021-04-26) 3642浏览 0评论368个赞
Ubuntu16.04 ROS:kinetic 源于:官网PX4开发指南(v1.10.0) ……继续阅读 » 手可摘星辰不敢高声语 5年前 (2021-04-26) 2167浏览 0评论385个赞
实现实时了解在海龟仿真器下海龟的位置信息 1.创建功能包 在上一篇博客创建的功能包下开发,所以就不……继续阅读 » nidie508 5年前 (2021-04-26) 2195浏览 0评论1825个赞
本教程建立在上一篇教程[ROS——无人机ROS仿真包 rotors_simulator 编译教程]的基础上,因此请先按照教程编译rotors_simulator 仿真包.本章教大家如何自己……继续阅读 » 懒小象 5年前 (2021-04-26) 3258浏览 0评论269个赞
目录一、解读launch文件:mrobot_laser_nav_gazebo.launch二、解读launch文件:gmapping_demo.laun……继续阅读 » 手可摘星辰不敢高声语 5年前 (2021-04-26) 3390浏览 0评论1456个赞
事前准备 使用工具:Python3.5 使用库:cv2,numpy 原始图像 ……继续阅读 » Eragonl 5年前 (2021-04-26) 2504浏览 0评论632个赞
上回接寻迹功能后,这次来介绍超声波避障功能。 我们将超声波固定在舵机上,再通过对舵机的控制来实现超声波的转向。 超声波避障功能 示……继续阅读 » nidie508 5年前 (2021-04-26) 2447浏览 0评论2235个赞
本文主要内容:PID控制器,MATLAB/Simu link仿真模型的搭建、介绍以及各控制器性能的比较与分析。……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3382浏览 0评论805个赞
在本教程中,我们将通过模拟控制器来驱动机器人的关节。这将使我们能够为MoveIt等规划器提供正确的ROS接口!。我们将使用ros_control软件包。 与ros……继续阅读 » 我是。 5年前 (2021-04-26) 3452浏览 0评论2310个赞
【从零开始的ROS四轴机械臂控制(四)】七、图像处理节点1.节点功能与实现方法……继续阅读 » Stan Fu 5年前 (2021-04-26) 1509浏览 0评论1401个赞
引言 最近几天一直在复习考试,拖更了蛮久的,这次我们继续来接着嵌入式单片机教学继续说,上次我们使用了IIC通信的传感器,以及IIC通信的LCD。……继续阅读 » 小白 5年前 (2021-04-26) 2782浏览 0评论962个赞
gazebo一、什么是Gazebo?Gazebo的典型用途Gazebo的一些主要特点……继续阅读 » 我是。 5年前 (2021-04-26) 3043浏览 0评论2046个赞
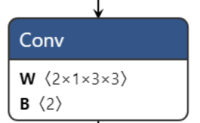
事先准备 使用工具:Python3.5 使用库:cv2,numpy 任务1:2D卷积 同一维信号一样,可以对2D图像实施低通……继续阅读 » Eragonl 5年前 (2021-04-26) 2893浏览 0评论1102个赞
本节主要目的是介绍本书所用到的数字图像处理的一些基本概念。来源于东北大学 魏颖教授的数字图像课程笔记。 图像的数字化 上一节中获取图像……继续阅读 » 小小何先生 5年前 (2021-04-26) 1983浏览 0评论102个赞
这是我见过讲解最详细最通俗易懂的决策树(一) 基本流程如何划分选择总结……继续阅读 » 三景页三景页 5年前 (2021-04-26) 1803浏览 0评论1800个赞
【从零开始的ROS四轴机械臂控制(五)】八、运动控制节点1.定义服务GoToP……继续阅读 » Stan Fu 5年前 (2021-04-26) 3550浏览 0评论1789个赞
上回书说到,小车的超声波避障功能基本完成。那么本篇就来介绍最后一个功能,蓝牙智能控制功能。 废话不多说,来吧。 蓝牙控制功能 最令……继续阅读 » nidie508 5年前 (2021-04-26) 1777浏览 0评论2226个赞
……继续阅读 » nidie508 5年前 (2021-04-26) 2405浏览 0评论2465个赞
涉及函数 cv2.erode(),cv2.dilate(),cv2.morphotogyEx() 首先 首先我们看下原始图像: &……继续阅读 » Eragonl 5年前 (2021-04-26) 3092浏览 0评论200个赞
这是我见过讲解最详细最通俗易懂的决策树(二)增益率基尼指数剪枝处理……继续阅读 » 三景页三景页 5年前 (2021-04-26) 2147浏览 0评论1361个赞
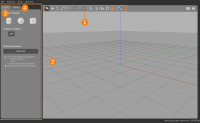
创建模型 本节目标一、模型编辑器用户界面调色板(左面板)工具……继续阅读 » 我是。 5年前 (2021-04-26) 3051浏览 0评论630个赞
【从零开始的ROS四轴机械臂控制(六)】 九、逻辑控制节点1.运动……继续阅读 » Stan Fu 5年前 (2021-04-26) 2228浏览 0评论893个赞
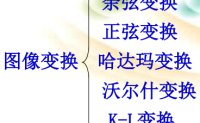
本节主要目的是介绍本书所用到的数字图像的变换,方便之后的处理。来源于东北大学 魏颖教授的数字图像课程笔记。 傅里叶变换 信号处理方法有……继续阅读 » 小小何先生 5年前 (2021-04-26) 2239浏览 0评论2629个赞
一. 前言 PID控制算法是工业控制领域数十年来应用最广泛的经典控制算法之一,其理论原理易于理解,算法结构简单,易于工程实现,这也是其受到工程师们青睐的重要原因。 尽管算法原理简单,其参数整定难度却因被控对象而异,不同工程师对同……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3161浏览 0评论745个赞
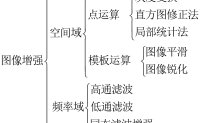
本节主要目的是介绍图像增强的一些基本概念。来源于东北大学 魏颖教授的数字图像课程笔记。 本节要点 ……继续阅读 » 小小何先生 5年前 (2021-04-26) 1954浏览 0评论931个赞
从零开始的ROS四轴机械臂控制(七)十、ROS与arduino连接1.虚拟机与……继续阅读 » Stan Fu 5年前 (2021-04-26) 2208浏览 0评论1892个赞
本文主要介绍如何利用MATLAB编程或者Simulink工具绘制伯德图和奈奎斯特图 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2654浏览 0评论867个赞
文章目录Step 1 建立基本的sdf模型1、创建新的.world文件2、添加地面和光线……继续阅读 » 我是。 5年前 (2021-04-26) 3300浏览 0评论2697个赞
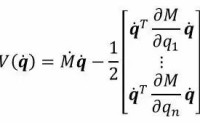
Sympybotics Sympybotic是一款使用python语言利用Sympy和Numpy包的开源机器人运动学和动力学的符号推导工具包,在机器人动力学参数辨识中可以用来建立机器人动力学模型,根据所建模型推导动力学最小惯性参数集和观测矩阵,并可……继续阅读 » 小磊在路上 5年前 (2021-04-26) 2337浏览 0评论524个赞
……继续阅读 » 今夜有雨 5年前 (2021-04-26) 2185浏览 0评论2873个赞
文章目录一、介绍二、准备网格模型三、将网格模型添加到sdf文件中 ……继续阅读 » 我是。 5年前 (2021-04-26) 2785浏览 0评论2078个赞