本系列文章主要介绍基于A*算法的路径规划的实现,并使用MATLAB进行仿真演示。本文作为本系列的第四篇文章主要对前三篇文章的内容进行一些细节的补充 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3597浏览 0评论1397个赞
摄像头为什么要标定 摄像头是一种非常精密的光学仪器,它对外界环境的感知是非常敏感的。由于摄像头内部和外部的一些原因,生成的物体图像常常会发生一定的畸变,例如在鱼眼摄像头,畸变是非常大的,如果直接将采集到的图像拿来进行图像处理的话,会产生很大的问题,为了避免数据源……继续阅读 » 编程芝士 5年前 (2021-04-26) 3391浏览 0评论2560个赞
机器人工具箱中的SerialLink 类中有现成的函数: SerialLink.fkine(theta),可以直接对已经建立的机器人模型做运动学分析 SerialLink.ikine(T) 可以求逆运动学参数。 ……继续阅读 » 小磊在路上 5年前 (2021-04-26) 2398浏览 0评论176个赞
目录 引言旋转矩阵的几个性质2.1 旋转矩阵是坐标轴的投影2.2 旋转矩阵是正交矩阵 2.3 旋转矩阵的每一列都是单位向量举例 总结 ……继续阅读 » hitgavin 5年前 (2021-04-26) 2775浏览 0评论134个赞
1、前言 最近一直在研究激光SLAM,源码看了一遍又一遍,对于细节的部分,短时间记住是怎么实现的了,过几天又忘了。据研究发现,往往图片可以给我们更加深刻的印……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1855浏览 0评论1529个赞
正动力学: 已知各个关节上电机提供的力/力矩,在此力矩作用下,关节如何运动,求对应各个关节角度、角速度、角加速度。 逆动力学: 已知一个轨迹点,以及关节速度、加速度、角加速度求出期望的关节力矩 机器人动力学参数查看: ……继续阅读 » 小磊在路上 5年前 (2021-04-26) 3098浏览 0评论410个赞
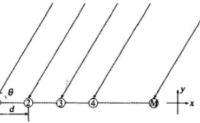
声源定位系统设计(一)——MVDR算法 下一篇:声源定位系统设计(二)——MUSIC算法以及Python代码实现将讲述本篇博客中算法的代码实现以及另一种波束……继续阅读 » CyrilSterling 5年前 (2021-04-26) 2337浏览 0评论372个赞
前言 上一篇中详细阐述了概率论的几个基本定理——概率密度函数、贝叶斯公式及推断、矩以及归一化积。 本篇将在上一篇的基础上,围绕高斯随机过程展开,详细讨论高斯概率密度函数的……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2218浏览 0评论2984个赞
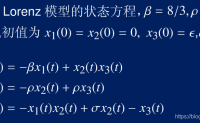
一、模型的常微分方程及初值 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 1804浏览 0评论427个赞
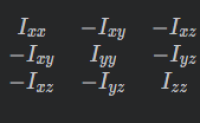
文章目录 题记机器人学中的惯性张量惯性张量在不同坐标系下的转换下面来举个栗子!……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2672浏览 0评论129个赞
OpenCV 形态学、模板匹配和运动检测 5. 形态学变换5.1 膨胀5.2 腐蚀……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2819浏览 0评论1184个赞
掌握Windows系统内存管理器的基本概念,并了解其内存管理机制,有如下优点: 拓展软件问题的解决思路帮助定位软件问题发现软件中存在的可优化点,并提供优化方向 本文分三个方向对Wind……继续阅读 » Z 5年前 (2021-04-26) 1937浏览 0评论2348个赞
声源定位系统设计(二)——MUSIC算法以及Python代码实现 上一篇:声源定位系统设计(一)——MVDR波束形成算法讲述了声源定位系统的一些基本概念以及……继续阅读 » CyrilSterling 5年前 (2021-04-26) 2564浏览 0评论2133个赞
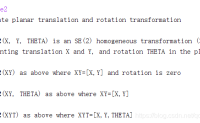
本篇文章主要与大家分享一下如何使用matlab进行二维和三维空间的位姿描述及坐标系的变换,文章内容处于更新和补充中,(我同时安装了机器人工具箱9.10版本和10.4版本)  ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2981浏览 0评论1378个赞
学习过程中涉及欧拉角和旋转矩阵的转换,索性整理学习一下欧拉角四元数和旋转矩阵的概念以及matlab中的互相转换 本文摘自各大课本,博客,自己学习整理使用,侵删 MATLAB矩阵乘法从左到右依次相乘 用R表示旋转矩阵。 yaw(偏航) pitch(俯仰) roll(横滚)分别表示Z……继续阅读 » 小磊在路上 5年前 (2021-04-26) 2302浏览 0评论1810个赞
先上结论: 在构型空间(也就是C空间中),不管机器人的构型如何,有几个自由度,它在构型空间中都只是一个点!!! 1. Work-Sp……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 1934浏览 0评论720个赞
前言 导航系统作为无人机的感知单元,承担着无人机状态参量测量与估计的重任。对于多旋翼无人机而言,其姿态、加速度、速度、位置以及各传感器的零偏与补偿系数均需要被测量或估计。这些众多参量之中只有极少一部分能够被直接或间接测量,大多数参数需要我们采用多个传感……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2235浏览 0评论2368个赞
一、什么是svm 支持向量机(Support Vector Machine, SVM)是一类按监督学习(supervised learning)方式对数据进行二元分类的广义线性分类器(generalized linear class……继续阅读 » 我是。 5年前 (2021-04-26) 3366浏览 0评论2673个赞
安装依赖 sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS_DISTRO-libuvc ros-$ROS_DISTRO-libuvc-camera ros-$R……继续阅读 » 谦墨 5年前 (2021-04-26) 3019浏览 0评论1129个赞
运行 Cartographer的配置参数比较重要,稍微不注意就会报错,例如一个常见的错误类型: [ERROR] [1602741280.449037435, 153.231000000]: Ignoring transform from……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2956浏览 0评论160个赞
目录1. 引言2. 齐次坐标系变换2.1 坐标系之间的位姿关系2.2 齐次变换矩阵……继续阅读 » hitgavin 5年前 (2021-04-26) 2128浏览 0评论2260个赞
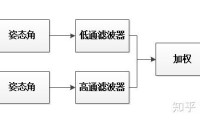
前言 上一篇中详细阐述了多旋翼飞行器导航系统中使用的主要传感器及其特性,本篇将着重介绍导航系统设计中常用的两种算法——互补滤波算法与卡尔曼滤波算法。同时,阐述一种多旋翼飞行器导航系统的设计方案。 互补滤波算法简介 互补滤波器的主……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2101浏览 0评论1721个赞
深入了解ROS细节之消息发布器和订阅器、mavros消息发布器和订阅器 编写简单的消息发布器和订阅器 (C++) ……继续阅读 » 不断积淀 5年前 (2021-04-26) 3314浏览 0评论2159个赞
一、什么是神经网络 神经网络是一种以人脑为模型的机器学习,简单地说就是创造一个人工神经网络,通过一种算法允许计算机通过合并新的数据来学习。 以人脑中的神经网络为启发,历史上出现过很多不同版本最著名的算法是1980年的 backpropagation……继续阅读 » 我是。 5年前 (2021-04-26) 2044浏览 0评论1179个赞
提前说说 博主是用寄存器写的驱动 历时两周,总算把小车弄好了,总体上来说做的太慢了。自己在32的学习中还不够仔细深入,只是浅面的学习,当真正做一个项目时,暴露的问题就太多了。这次在小车的制作的过程中,遇到了各种各样……继续阅读 » nidie508 5年前 (2021-04-26) 2546浏览 0评论1144个赞
这讲会提供示例代码! Content 1. “迷宫寻宝”……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3832浏览 0评论2037个赞
Intel杯比赛结束已有两个月,我们这些实验室的中坚力量也该退休了,但还是要遵从实验室的传帮带学习模式,所以这几天要开始带一下学弟学妹们了。 那么学习ros最开始的就是ros操作系统的安装了,第一篇博文就从ros安装好了。 ……继续阅读 » nidie508 5年前 (2021-04-26) 2193浏览 0评论1312个赞
文章目录 算法求解过程代码及解析(参考Robotics Toolbox) 算法求解过程<……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3263浏览 0评论1457个赞
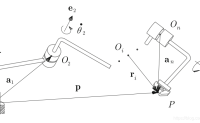
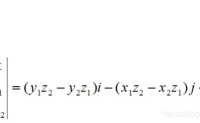
基础知识 速度矢量,角速度矢量,叉乘运算 速度是描述质点运动快慢和方向的物理量,等于位移对时间的微分。同时也等于加速度对时间的积分。 角速度: 定义:一……继续阅读 » 小磊在路上 5年前 (2021-04-26) 2021浏览 0评论2833个赞
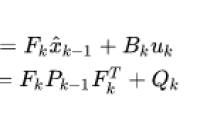
前言 扩展卡尔曼滤波(EKF)是多旋翼飞行器导航系统设计中,最常用的最优估计算法之一。其原理是在卡尔曼滤波的基础上,对非线性模型进行线性化,再进行最优估计,因此,其核心算法原理与卡尔曼滤波算法相似。本篇将围绕卡尔曼滤波展开 ,阐述其核……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3290浏览 0评论607个赞
数据集介绍 使用Fashion MNIST数据集,其中包含10个类别的70,000个灰度图像。图像显示了低分辨率(28 x 28像素)的单个衣物,如下所示(图片来自tensorflow官方文档): ……继续阅读 » 我是。 5年前 (2021-04-26) 2725浏览 0评论280个赞
SLAM:同时定位和建图(Simultaneous Localization and Mapping)。 机器人从未知环境中的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地……继续阅读 » 目睹闰土刺猹的瓜 5年前 (2021-04-26) 3175浏览 0评论1942个赞
安装、起步和IDE工具 一、ROS安装1.1 配置软件库1.2 安装ROS1.3……继续阅读 » 小黑鸭 5年前 (2021-04-26) 1676浏览 0评论2968个赞
目录 1. 引言 2. 齐次变换矩阵的三种解读 2.1 坐标系表示  ……继续阅读 » hitgavin 5年前 (2021-04-26) 3748浏览 0评论1360个赞
实战Omniglot数据集识别(手写数字MNIST升级版) 目录实战Omniglot数据集识别(手写数字MNIST升级版)……继续阅读 » CyrilSterling 5年前 (2021-04-26) 2516浏览 0评论1883个赞
J0:假设位姿q(1xN)对应的雅克比矩阵(6xN),N为机器人关节的个数,机器人雅克比矩阵将关节速度与末端执行器空间速度V=J0*qd映射到世界坐标系中,即在末端执行器坐标系中计算雅可比矩阵并将其转换为世界坐标系 <……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3419浏览 0评论630个赞
这一个月来 距离实验室纳新后,已经过去一个月左右了。听取了学长的建议,这段时间也一直在搞Arduino这个软件,还算不错的认识了这个开源软件。(自我认为) 但是现在的依旧是一个小萌新,不说在软件代码的掌握程度,现在连有……继续阅读 » nidie508 5年前 (2021-04-26) 2553浏览 0评论1288个赞
有一段时间没有更新博客了,最近一段时间都在忙毕业和实习,闲暇的时候也在学习怎么写公众号推文,实在惭愧。毕业设计做的是平衡小车,这几天某宝买的器件还不知所踪,新的PCB电路板又不想画,所以在想要不把做过的过程回顾一次,以后好写论文。该项目会分“模块选型篇”、“原理篇……继续阅读 » 歌者弥城 5年前 (2021-04-26) 3098浏览 0评论207个赞
目录1. 引言2. 连杆坐标系3 DH参数3.1 DH参数的介绍……继续阅读 » hitgavin 5年前 (2021-04-26) 2702浏览 0评论2893个赞
该篇博客紧接接上一篇开题篇创 基于stm32的两轮自平衡小车1(模块选型篇)(鸽了好些日子了…)。该篇为原理篇,包含一些理论分析的部分,碰到一些自己可能写不好的地方直接引用……继续阅读 » 歌者弥城 5年前 (2021-04-26) 3673浏览 0评论428个赞
一、什么是knn算法 本章着重对算法部分进行讲解,原理部分不过多叙述,有兴趣的小伙伴可以自行查阅其他文献/文章 (一)、介绍<……继续阅读 » 我是。 5年前 (2021-04-26) 2655浏览 0评论673个赞
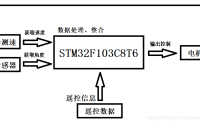
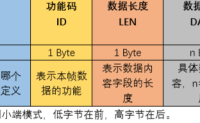
本文主要内容:详细介绍如何从0开始写一个数据通信,将数据从单片机发送到上位机(或者虚拟示波器)进行数据或图像显示,帮助我们调节一些参数,比如电机PID的调节、波形融合等,以及在我们写通信协议的时候可能遇见的问题或注意事项进行解答,本文主要以匿名上位机为例,新手和小白也……继续阅读 » 慕羽★ 5年前 (2021-04-26) 1860浏览 0评论1050个赞
前言 上一篇中围绕一个简单的匀速直线运动的状态估计仿真实例展开,阐述了卡尔曼滤波器的实现方式、过程以及仿真效果。本篇将对卡尔曼滤波的几个主要参数的选取作一定的说明,同时,围绕扩展卡尔曼滤波算法展开,阐述其与卡尔曼滤波器的区别与作用。 ……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2205浏览 0评论342个赞
嗨伙计们,我又来啦~ 在上次的文章[《webots玩转控制论之LQR控制器》](https://www.guyuehome.com/17688)中,我们假设系统是全状态反馈的……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2888浏览 0评论766个赞
安装步骤 适用于 Linux 的 Windows 子系统(WSL)可让开发人员按原样运行 GNU/Linux 环境 – ……继续阅读 » 谦墨 5年前 (2021-04-26) 2382浏览 0评论306个赞