添加camera相机1. 添加camera实体2. 添加camera控制接口代码3. 运行效果参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2770浏览 0评论2240个赞
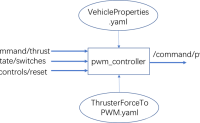
推进器电机模型文件的内容只有一个:推进器推力与PWM波的映射关系。当我们推算得到某时刻该推进器需要提供的推力时,我们需要根据映射关系计算出出对应的PWM波下发给下层以实现控制。不同类型的推进器推力与PWM波的映射关系是不同的,这个有的产品可能会给出,没有的话可能需要自行测定。 &……继续阅读 » iwande 5年前 (2021-04-26) 2864浏览 0评论1427个赞
近两年来,双十一上热搜的已经不仅仅是划算的原因了,还有着#数学不好算不清##忘记合并尾款#等令人头大的规则,直播间还是旗舰店?怎么凑单怎么满减?养猫组队又是什么操作? 如果你算不清淘宝双十一,那古月居这么简单明了,你一定算的清。毕竟我们只做两件事情:送钱&……继续阅读 » 你好哇塞 5年前 (2021-04-26) 4267浏览 0评论1687个赞
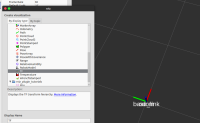
1、创建功能包创建odom_tf_package功能包 c……继续阅读 » ZEEN 5年前 (2021-04-26) 2499浏览 0评论640个赞
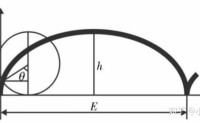
一、运动规划算法简述 实现流程 通过给定的轨迹点,根据设定的最大速度和加速度计算每个点的速度,加速度和时间帧。 轨迹点:可通过插补获得,数据类型为moveit_msgs::RobotTraje……继续阅读 » white_Learner 5年前 (2021-04-26) 2265浏览 0评论296个赞
无人机仿真-PX4固件编译、3D仿真环境gazebo及offboard模式控制无人机运动 这篇博客讲的是如何使用仿真环境进行无人机的仿真和控制,如果还没搭建好仿真环境,可以参考我的上一篇……继续阅读 » 不断积淀 5年前 (2021-04-26) 2170浏览 0评论1997个赞
主题 视觉测距作为机器视觉领域内基础技术之一而受到广泛关注,其在机器人领域内占有重要的地位,被广泛应用于机器视觉定位、目标追踪、视觉避障等。 视觉测距主要分为单目测距、双目测距、结构光测距等。结构光由于光源的限制,应用的场合比较固定;而双目测距的难点在于特征点的……继续阅读 » Eragonl 5年前 (2021-04-26) 2514浏览 0评论1442个赞
轻量级实时语义分割:ICNet & BiSeNetICNet贡献Image Cascade……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 2659浏览 0评论544个赞
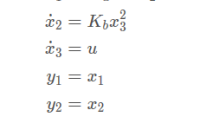
文章目录本文软件版本jointSpaceMotionModel……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3649浏览 0评论2761个赞
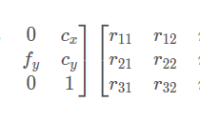
相机模型这节的内容是最最基础重要的内容。再次回顾依然有所收获。但这一章的内容其实并不多。但是容易混淆。 1.一共涉及到的坐标系有四个: 第一,世界坐标系; 第二,相机坐标系; 第三,归一化相机坐标系; 第四,像素坐标系。 世界坐标系意如其名,不多解释;而……继续阅读 » 微鉴道长 5年前 (2021-04-26) 1991浏览 0评论595个赞
本文将介绍两种使用激光雷达的建图方法 本文所使用的代码:网盘链接&nb……继续阅读 » ZEEN 5年前 (2021-04-26) 2100浏览 0评论1161个赞
深入了解ROS之编写无人机控制程序包 这篇教程来详细介绍一下如何编写出一个控制无人机的ROS程序包 编写ROS程序包推荐roboware-studio,这款软件是在开源的……继续阅读 » 不断积淀 5年前 (2021-04-26) 1608浏览 0评论2302个赞
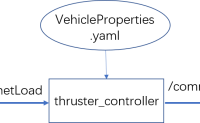
现在开始介绍demo的基础控制模块程序。基础控制模块包含推力分配模块、PWM波计算模块,数据串口下发模块。每个模块的主要功能可以回头看软件框架简介的那一篇文章,在此不做介绍,后续主要介绍的是程序中的一些关键点。 本文主要介绍的推力分配模块的几个关键函数。对应程序中的……继续阅读 » cabinx 5年前 (2021-04-26) 2959浏览 0评论2922个赞
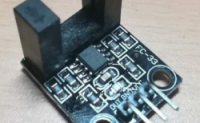
文章目录Arduino智能小车——小车测速测速模块的安装测速模块讲解……继续阅读 » 懒小象 5年前 (2021-04-26) 3452浏览 0评论744个赞
主题 本章我们要学习的是目标物体检测,这里我们需要使用到SIFT特征提取,BOW词袋建立以及SVM支持向量机的知识(这些讲起……继续阅读 » Eragonl 5年前 (2021-04-26) 3109浏览 0评论1445个赞
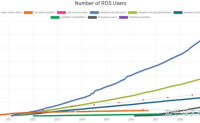
一、概述 机器人开发是一门综合学科,需要用到各方面知识,包括且不限于计算机,数学和物理等各个领域。因其综合程度高使其开发较为繁琐且困难,ROS的出现大大简单了机器人开发的门槛,ROS全称Robot Operating System,本质上是一个分布式系统架构,提……继续阅读 » white_Learner 5年前 (2021-04-26) 2766浏览 0评论480个赞
文章目录无人机仿真之仿真平台搭建前言ardupi……继续阅读 » 不断积淀 5年前 (2021-04-26) 3317浏览 0评论354个赞
这部分内容相当简单,基本上读懂推进器电机模型文件就很容易能读懂程序。可以查阅之前撰写的关于电机模型文件的文章(链接)。程序对应c……继续阅读 » cabinx 5年前 (2021-04-26) 1827浏览 0评论2245个赞
全文框架 ……继续阅读 » WillChan_ 5年前 (2021-04-26) 3024浏览 0评论1116个赞
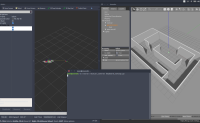
基于unity无人机3D仿真《一》实现无人机的模型的制作、运动学关系、姿态角等;实现无人机各种姿态运动。 一、目前的效果 ……继续阅读 » 永望 5年前 (2021-04-26) 3391浏览 0评论305个赞
在linux下使用opencv编译yolo前言安装opencv1) 安装依赖文件……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 2041浏览 0评论1580个赞
一、准备工作1、下载代码并安装必要功能包 本文代码已上传 github 期待点个star ……继续阅读 » ZEEN 5年前 (2021-04-26) 2249浏览 0评论283个赞
导言 本人第一次接触这个!有很多专业名词的确未曾了解到,如果有错误请指出,感谢! 仅仅当作学习笔记在此记录,有不严谨的地方请见谅。会将自己觉得有代表性的课后习题放上来。 ……继续阅读 » aic1999 5年前 (2021-04-26) 2747浏览 0评论626个赞
用了这么久ROS MoveIt,你真的了解它么? 你可能使用MoveIt控制过实物机器人,但是MoveIt运动规划的pipeline是什么? 你可能听说过ROS的插件机制,但是如何通过代码实现一个插……继续阅读 » 古月居官方 5年前 (2021-04-26) 1919浏览 0评论2330个赞
开源自主导航小车MickX41 ROS底盘电气系统1.1 底盘机械组装1.2 底盘硬件框图……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2064浏览 0评论2665个赞
全文框架 ……继续阅读 » WillChan_ 5年前 (2021-04-26) 2283浏览 0评论777个赞
本文介绍手柄控制模块的代码。模块对应cabin_teleop。结合前几篇关于基础运动模块代码的解析,显然我们只需要操控手柄发布力和力矩的信息[Fx,Fy,Fz,Mx,My,Mz]即可实现对机器人的控制。如发布[10,0,0,0,0,0]即表示对机器人施加x轴方向10N的力,机器人……继续阅读 » cabinx 5年前 (2021-04-26) 3531浏览 0评论1976个赞
文章目录1. 安装依赖工具2. 源码下载编译2.1 创建ROS工程2.2……继续阅读 » 懒小象 5年前 (2021-04-26) 1823浏览 0评论2243个赞
机械臂建模分析:https://blog.csdn.net/Kalenee/article/details/81990130 MoveIt规划下的关节空间运动分析:http://www.guyuehome.com/752 ……继续阅读 » white_Learner 5年前 (2021-04-26) 2111浏览 0评论2464个赞
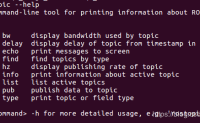
模块对应cabin_controllers/serial_to_mcu。模块实现的功能为监听网络中PWM矩阵信息,将其转换成十六进制数据通过串口下发至MCU,实现对推进器电机的控制。模块数据的串口通信借助了ros的serial工具包(sudo apt-get install ro……继续阅读 » cabinx 5年前 (2021-04-26) 2741浏览 0评论2129个赞
目录 1、什么是MAVLink……继续阅读 » autotian 5年前 (2021-04-26) 3611浏览 0评论2419个赞
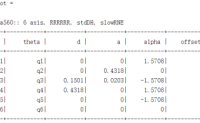
写在前面 本文所有机械臂均采用标准D-H建模法,该方法的建立过程可参考机器人学回炉重造(1):正运动学、标准D-H法与改进D……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 4288浏览 0评论1970个赞
这部分的内容,第一次看觉得很难看懂,不知所云;最近第二次看,可以看明白了。本着“先赶理论,后赶代码,借着代码复习C++”的原则,现在先不去学习代码的内容。 这一章的内容,应该先从宏观上看。第一次看的时候,就是陷入了细节,忘记了每时每刻主要是在做什么,因此看完之后不能……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3315浏览 0评论482个赞
文章目录1. Link元素结构2. link详细属性解析3. joint元素结构4. Joint详细属性解析……继续阅读 » 懒小象 5年前 (2021-04-26) 3968浏览 0评论988个赞
主题 本章我们要学习的是运动物体的跟踪,现代图像处理中经典的几种跟踪方法主要是:meanshift(均值漂移),Camshift(meanshift的优化版本),KCF,光流法等。 我们本章主要介绍的是前两种,meanshift(均值漂移)以及Camshift(……继续阅读 » Eragonl 5年前 (2021-04-26) 2594浏览 0评论1038个赞
机器人动力学建模之牛顿欧拉法推导 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3277浏览 0评论835个赞
先看书了解一下等效转轴与等效转角 下面是笔记记录部分 像……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2567浏览 0评论2111个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 1886浏览 0评论1903个赞
……继续阅读 » 吴凯荣 5年前 (2021-04-26) 1945浏览 0评论1476个赞
引言 都知道旋转矩阵表达的是刚体(坐标系{B})相对参考坐标系{A}的姿态信息,那如何利用已知的旋转矩阵……继续阅读 » aic1999 5年前 (2021-04-26) 2724浏览 0评论1199个赞
引言 哈喽各位~好久不见,看到标题应该知道,小白给大家又要开启一系列的新教程了。肯定有人说我跨度还蛮大的,从ROS到神经网络又到嵌入式教学,其实……继续阅读 » 小白 5年前 (2021-04-26) 3211浏览 0评论777个赞
全文框架 ……继续阅读 » WillChan_ 5年前 (2021-04-26) 2760浏览 0评论2432个赞
官网教程:http://gazebosim.org/tutorials?cat=guided_i&tut=guided_i6 《一》ros通信的意义 在利用gazebo仿真时。我们可以利用gazebo的通信机制进行创建节点和……继续阅读 » 永望 5年前 (2021-04-26) 3516浏览 0评论369个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3315浏览 0评论2110个赞
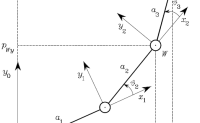
导言 我们都知道关节一般会导致(驱动)机械臂产生两种状态:平移或者转动。也知道我们需要借助坐标系来描述物体的姿态和位置信息,那如何为一整个机械臂建立一个完整的坐标系,从而……继续阅读 » aic1999 5年前 (2021-04-26) 2968浏览 0评论2068个赞