之前对MoveIt的印象一直停留在使用Rviz拖动机械臂模型,然后再点击“plan”实现轨迹的规划,点击“execute”执行机械臂的运动这种比较浅层的功能。实际我们在控制机械臂运动的时候大都是通过编程的方式控制,而不是Rviz的图形化控制。 在MoveIt中有三个主要的控制接口……继续阅读 » 5年前 (2021-04-26) 2949浏览 0评论1361个赞
具体介绍见就上一篇文章:《MoveIt简单编程实现机械臂运动(正运动学)》 使用的是probot机械臂模型,还是在关节空间下。首先看一下逆运动学规划的例程,逆运动学规划简单的……继续阅读 » 5年前 (2021-04-26) 3076浏览 0评论1950个赞
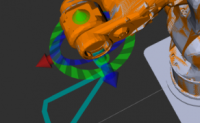
Moveit在规划路径的时候考虑如何躲避障碍物的问题,Moveit可以实时的检测空间中的障碍物,并规划处轨迹绕过障碍物。 在场景中加入障碍物方式 ……继续阅读 » 5年前 (2021-04-26) 2532浏览 0评论758个赞
前两篇文章是关于在关节空间中进行机械臂的运动控制: MoveIt简单编程实现关节空间机械臂运动(逆运动学) ……继续阅读 » 5年前 (2021-04-26) 2339浏览 0评论1206个赞
机械臂的控制原本使用的就是ROS进行的,奈何实验室机械臂上买的机械二指夹爪并不支持ROS平台,及没有对应的模型文件和控制的包,因此控制机械手爪就需要其他办法。 所使用的机械手爪为nGripper90,如下图所示,查看手爪的用户手册发现,其配套包括ModBus/Tcp……继续阅读 » 5年前 (2021-04-26) 3390浏览 0评论1653个赞
在上一个博文中介绍了一个简单的目标识别的例子,在这篇博客中,例如是别的结果,完成机械臂的抓取控制,主要进行程序的分析和学习。 包含的头文件: #include <……继续阅读 » 5年前 (2021-04-26) 3125浏览 0评论824个赞
ROS无法直接进行图像处理,需要借助于opencv,要使用cv_bridge把ROS 的图像数据格式转为Opencv可以使用的数据格式。即是一个提供ROS和OpenCV库提供之间的接口的开发包。然后可以将opencv处理好的图像再转换回ros中的数据格式。 ……继续阅读 » 5年前 (2021-04-26) 3020浏览 0评论1635个赞
摄像头为什么要标定 摄像头是一种非常精密的光学仪器,它对外界环境的感知是非常敏感的。由于摄像头内部和外部的一些原因,生成的物体图像常常会发生一定的畸变,例如在鱼眼摄像头,畸变是非常大的,如果直接将采集到的图像拿来进行图像处理的话,会产生很大的问题,为了避免数据源……继续阅读 » 5年前 (2021-04-26) 2816浏览 0评论2301个赞
UR5介绍 Universal Robots(优傲机器人)公司是一家引领协作机器人全新细分市场的先驱企业,该公司成立于2005年,关注机器人的用户可操……继续阅读 » 5年前 (2021-04-26) 3149浏览 0评论1984个赞