本文作者:zhangrelay 英文视频教程Foxy: https://www.bilibili.com/video/bv1sD4y1……继续阅读 » zhangrelay 5年前 (2021-04-26) 1802浏览 0评论614个赞
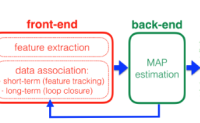
补充 深蓝学院-手写VIO 第六章 与《十四讲》前端知识不重合的部分。内容较少,没有前几章丰富。 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2039浏览 0评论1825个赞
掌握ROS2内置工具可以更高效的学习和使用其开发机器人软件程序,英文视频如下: https://www.bilibili.com/video/bv1Jg4y1v7vn 本节主要介绍以下阅读自述文件和代码常用的文本工具,提高学习和代码……继续阅读 » zhangrelay 5年前 (2021-04-26) 3254浏览 0评论1646个赞
目录 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2802浏览 0评论650个赞
工区/工作区/工作空间(workspace简写为ws)是机器人操作系统核心概念之一。 工作空间是包含ROS 2软件的文件夹。在使用ROS 2之前,必须在正在使用的终端中配置ROS 2工作区(包括系统和局……继续阅读 » zhangrelay 5年前 (2021-04-26) 2268浏览 0评论779个赞
上期介绍了Arduino的基本知识,今天直接上实例来给大家讲解TCPServe……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3496浏览 0评论837个赞
ROS Noetic Ninjemys是ROS1最具里程碑式的版本!为什么呢? ……继续阅读 » zhangrelay 5年前 (2021-04-26) 4007浏览 0评论2896个赞
引言 在前面部分的预处理中,我们总共完成了以下的功能,在图片中框出车牌部分,并将识别出来的车牌进行二值化处理,再进行字符分割。 到此,我们便可以……继续阅读 » 小白 5年前 (2021-04-26) 2967浏览 0评论1895个赞
目前最主流的机器人操作系统为ROS1+ROS2,已成业界共识,如果没有购买机器人硬件又想学习机器人相关知识,那么一款仿真软件必不可少,软件分为免费和付费,下面将详细介绍。 每个人心中最好的机器人仿真软件标准不同,此文只做汇总不做评论,不……继续阅读 » zhangrelay 5年前 (2021-04-26) 3562浏览 0评论224个赞
本文作者:陈瓜瓜 许久没更新了,放假回家没想到还要被老师催论文,连玩耍的时间都不够= =.好了,闲话少说 例1 上一讲讲了一些类什么的基础.这一讲我们就谈谈怎么在类中发布和接收消息了.当你遇到稍微大型一点的……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2437浏览 0评论1664个赞
“Spot “机器人,此前被称为 “SpotMini”,是波士顿动力公司开发的一款四条腿的类似狗的机器人。 详细介绍的短视频在文末,如需简要了解,不必观看视频,个人一直觉得视频的时间成本很高,流量成本很高,制作成本也很高,这三高是相对于图文博客而言。……继续阅读 » zhangrelay 5年前 (2021-04-26) 3235浏览 0评论1901个赞
引言 这部分可以说是独立于我们整个项目的一小节,不过也是极为重要的一小节,这一节的学习可以帮助我们去了解神经网络。我们用一个很简单的例子进行参考……继续阅读 » 小白 5年前 (2021-04-26) 1842浏览 0评论2322个赞
之前我们一直在用rosrun跑程序,格式如下 rosrun package_name executable_file_name &nbs……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2245浏览 0评论272个赞
摘要:本文剖析Contiki最简单的实……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2884浏览 0评论2545个赞
欢迎来到第七讲,我居然能写这么多,撒花!! rosbag是用来储存ros消息的东西。 在我们平时处理一些robotics问题的时候,我们得到一些数据,有些时候我们需要实时的处理,即获得数据,写好的程序分析数据然后得出结果,但另一些时候 ……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 3295浏览 0评论2167个赞
1 Webot介绍 Webots是一个开源的三维移动机器人模拟器,它与gazebo类似都是ros中仿真环境,但是对于gazebo而言,需要比较复杂的配置,尤其是涉及到使用GPU的时候,对我们这些初学者并不友好。webot在2018年以前是一款商业软件,商业软件的……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2647浏览 0评论2032个赞
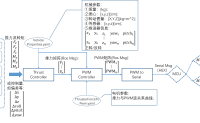
当前,水下领域比较小众,开源的资料比较少。Bluerov作为成熟的产品,结合其开源的优势,经历了多年的技术迭代,在市场上受到极大欢迎。刚接触水下领域时,希望能找到一个比较方便的实验平台,开源的Bluerov基本上算是唯一的选择。 Bluerov本身的软件架构,Pix……继续阅读 » cabinx 5年前 (2021-04-26) 2580浏览 0评论1445个赞
欢迎来到第8讲,预计还有两讲结束ROS相关的话题。 Rviz作为ROS的可视化工具拥有非常强大的功能,我也不是全部都用过,略懂皮毛。可视化是我们分析问题,向他人展现成果时最重要的工具。打个比方,我们在第三讲能够发布poseS……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2311浏览 0评论2262个赞
本文作者:iwande1.为什么要介绍这个方法? 2018年的时候,D.DeTone等人发表了Self-Supervised Interest Point Detection and Description,提出了一种特征提取……继续阅读 » iwande 5年前 (2021-04-26) 3675浏览 0评论2688个赞
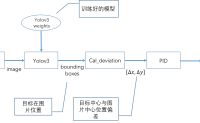
本文主要介绍ROV水下目标跟踪的简易demo软件实现的思路。 一、视觉模块 视觉模块的任务为:通过单目相机识别目标,并计算目标中心位置与图像中心位置的偏差,通过PID控制器得到控制量。demo中得到的控制量可以理解为竖直方向的推力……继续阅读 » cabinx 5年前 (2021-04-26) 1672浏览 0评论364个赞
在写这篇教程之前,我想说的话 作为一名机器人队老队员,我深知技术传承的困难和重要。 对于标准平台组来说,时间还会浪费在前人已经弄懂的API甚至是有关代码格式的问题上,这对我们去深入开发是非常不利的。 对于服务机器人组来说,更需要有一个……继续阅读 » 郑纯然 5年前 (2021-04-26) 2684浏览 0评论1876个赞
这两天入校手续马上办完了,就要进组搬砖了。组里除了做3D激光SLAM,视觉IMU融合的学长,还有做传感器的和水下SLAM的。就着对各个方向多些了解进而发散思维的想法,从而去了解了水下SLAM。 ……继续阅读 » 郑纯然 5年前 (2021-04-26) 2213浏览 0评论1584个赞
准备工具:需要备份的SD卡,读卡器,PC(Linux) 1、安装必备工具软件: sudo apt-get install dosfstools dump parted kpartx 2、将装载sd卡的读卡器插入PC,查看sd卡使用……继续阅读 » cabinx 5年前 (2021-04-26) 2794浏览 0评论1579个赞
在机器人领域里,多个坐标系统应该是最常见的事之一了。 一个机械臂,每一个关节都需要一个坐标系,一个无人小车不同的传感器一般都需要自己的坐标系。必不可少的,他们都需要世界坐标系。 有些坐标系是移动的,比如在一……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2854浏览 0评论2137个赞
您真的懂了移动机器人是怎么构建地图的吗?……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2946浏览 0评论1462个赞
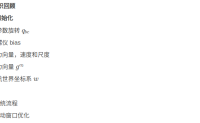
目前网上有很多分析文章,但是都只是一些比较基础的原理分析,而且很多量,虽然有推倒,但是往往没有讲清楚这些量是什么,为什么要有这些量,这些量是从哪来的,也没有刷通整个代码,或者太简练了,对新手不友好。这一次我计划从原理/代码一步步刷通整个VINS,并且说清楚代码中遇到的每一个数据结……继续阅读 » iwande 5年前 (2021-04-26) 2647浏览 0评论896个赞
占据栅格地图构建(Occupancy Grid Map) 上一篇文章介绍了,移动机器人地图构建问题,主要以gmapping为例,讲解了地图构建的整个流程。看过前面文章的小伙伴肯定都知道,gmapping算……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3319浏览 0评论2492个赞
你问古月答 ……继续阅读 » 古月居官方 5年前 (2021-04-26) 3058浏览 0评论1243个赞
欢迎来到最后一讲。关于自定义消息类型网上已经有一些文章了,写地也明了,不过这这里会补充的几点就是你自定义了一个新的消息类型之后在不同的package和不同的workspace中如何使用,当然我们仍然从基本的讲起。 定制基本消息……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2911浏览 0评论567个赞
各个部分的讲解如下: 【SLAM】VINS-MONO解析——综述 【SLAM】VINS-MONO解析——feature_tracker 【SLAM】VINS-MONO解析——IMU预积分 【SLAM】VINS-MONO解析——vins_estimator 【SL……继续阅读 » iwande 5年前 (2021-04-26) 2503浏览 0评论1846个赞
ros 与 matlab 通讯使用的是ros中的主从机策略。 1 准备条件 1、首先我们需要在matlab上安装 “Robotics_System_Toolbox” 工具箱,matlab2015B及以后自动安装有这个工具箱,但是可能由于激活的缘故,使得在输入r……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2932浏览 0评论204个赞
做工程时需要在树莓派进行串口通信。具体为接收到某个ROS的topic数据后,向串口下发数据。代码编写有两种方法。 方法一:借助serial库 1、运行环境为ubuntu,首先安装serial库: ……继续阅读 » cabinx 5年前 (2021-04-26) 2416浏览 0评论358个赞
对于做ROS或者机器学习、深度学习的小伙伴,(重)装Ubuntu系统已经轻车熟路了吧。不经意间,升级内核导致显驱失效无法开机、ROS不小心搞坏,修复不如重装、或者首次安装系统等困扰,Ubuntu应用商店不好用、挨个装软件又很麻烦、有些软件还要搜索一下安装方式等等苦恼,都交给【Ub……继续阅读 » bug404 5年前 (2021-04-26) 3305浏览 0评论1475个赞
Webot 与ROS通讯1 Webot Ubuntu客户端与ROS通讯1.1 配置webots_ros包……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 1898浏览 0评论1704个赞
理解坐标系之间的转换关系很重要。对于刚体变换矩阵,搞机器人的朋友肯定不陌生,它一般如下表示 ……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2883浏览 0评论1604个赞
这个系统是基于香港科技大学飞行机器人组的开源框架VINS-Mono开发的,原开源框架是针对单目SLAM。本双目SLAM系统是在原单目开源框架基础上的二次深度开发,外部接口与原框架一致。这个项目是我的研究课题项目,非商业用途,感谢HKUST的沈老师课题组提供的开源框架。该项目的gi……继续阅读 » iwande 5年前 (2021-04-26) 2738浏览 0评论457个赞
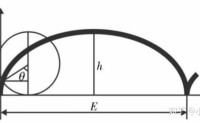
先讨论滤波器的概念,滤波的意思是,让机器人在某个正确位置上对应的概率越高越好。也就是可以理解为:把错误位置上的概率滤低,把正确位置处的概率滤高。 假设一个机器人小R在如下场景中出现,他刚开始不知道自己在哪(小R还没看到他眼前的门),因此他在这个场景中任……继续阅读 » 郑纯然 5年前 (2021-04-26) 2975浏览 0评论648个赞
引言 前面带大家搭建了一个简单的神经网络进行曲线拟合,现在通过大家对神经网络的初步了解,我们今天将进行更深入的学习。 ……继续阅读 » 小白 5年前 (2021-04-26) 2959浏览 0评论1347个赞
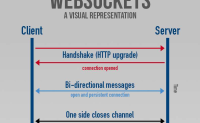
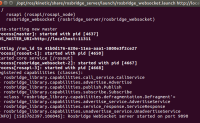
nav2djs导航组件是通过web网页来控制机器,具体而言,我们在机器人端运行导航算法等,然后再局域网下通过其他的设备端用浏览器查看机器人的地图,并通过在网页上点击的方式设定目标点引导机器人运行到指定位置,如果还对这个组件的功能有疑问的可以查看官方的演示视频:【2】或 ……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 1985浏览 0评论838个赞
这篇文章针对有一定SLAM基础的同学或者对李群李代数的应用感兴趣的数学专业同学,已经很小众了,但对于真正干这行并想要更深理解的同学可能会很有帮助,因此花了些时间整理发出来。要从理论推导到后面代码应用都读懂难度还是比较大,尽量讲解。 李群李代数其……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 3287浏览 0评论330个赞
摘要 ROS 导航堆栈对于移动机器人从一个地方移动到另一个地方是强大的可靠。导航堆栈的工作是通过处理来自测距、传感器和环境图的数据来产生让机器人执行的安全路径。最大限度地提高此导航堆栈的性能需要对参数进行一些精细的调整,这项工作并不像看起来那么简单。如果对概念和……继续阅读 » 郑纯然 5年前 (2021-04-26) 2084浏览 0评论1248个赞
Paper阅读:Dynamic-SLAM前言Missed detection compensation algorithm(漏检补偿算法)S……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 3241浏览 0评论1476个赞
……继续阅读 » iwande 5年前 (2021-04-26) 2138浏览 0评论1305个赞
新建环境模型1 新建世界模型2 添加机器人模型3 添加机器人控制器参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3515浏览 0评论670个赞
vins-mono刷了三遍,手写vio刷了两遍,SLAM十四讲刷了两三遍,从一开始完全看不懂是啥,不知道什么是SLAM,什么是VIO,什么是VINS,什么是SO3/SE3,甚至不知道什么是IMU…再到自己写总结写攻略,真的有很多感慨。学习开源代码的目的其实就是是为了自己能够去开发……继续阅读 » iwande 5年前 (2021-04-26) 2526浏览 0评论2877个赞