文章目录本文软件版本loadrobotimportrobotri……继续阅读 » 5年前 (2021-04-26) 2753浏览 0评论490个赞
Simscape建模笔记 urdf开始讲起吧……继续阅读 » 5年前 (2021-04-26) 3721浏览 0评论858个赞
写在前面 学习代码都记录在个人github上,欢迎关注~ 前面的博客已经写……继续阅读 » 5年前 (2021-04-26) 2078浏览 0评论2397个赞
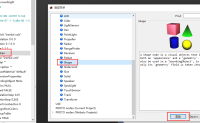
最近在看相关的课程,把作业做一下,还是蛮有意思的。 UR机械臂的物理模型文件是根据SolidWorks插件simscape导出的xml文件,课程直接提供的,博客不便给出,清楚整个建模原理就行。但个人还是觉得urdf文件好理解一些,可以人为控制各个坐标系的方向、位置还有质心的位置,……继续阅读 » 5年前 (2021-04-26) 2577浏览 0评论1048个赞
双臂Matlab仿真建模文章目录双臂Matlab仿真建模……继续阅读 » 5年前 (2021-04-26) 2946浏览 0评论718个赞
文章目录本文软件版本软件介绍代码功能介绍……继续阅读 » 5年前 (2021-04-26) 3104浏览 0评论427个赞
文章目录本文软件版本jointSpaceMotionModel……继续阅读 » 5年前 (2021-04-26) 1783浏览 0评论2486个赞
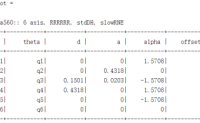
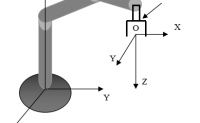
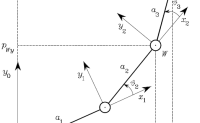
写在前面 本文所有机械臂均采用标准D-H建模法,该方法的建立过程可参考机器人学回炉重造(1):正运动学、标准D-H法与改进D……继续阅读 » 5年前 (2021-04-26) 3891浏览 0评论766个赞
先看书了解一下等效转轴与等效转角 下面是笔记记录部分 像……继续阅读 » 5年前 (2021-04-26) 3398浏览 0评论890个赞
写在前面 下面程序中涉及到如下两部分内容: 正逆运动学算法:五自由度机械臂正逆运动学算法(C语言+Matlab) 简……继续阅读 » 5年前 (2021-04-26) 2257浏览 0评论1820个赞
文章目录inverseKinematics利用创建得到的ik对……继续阅读 » 5年前 (2021-04-26) 3538浏览 0评论2734个赞
文章目录准备工作generalizedInverseKinematics……继续阅读 » 5年前 (2021-04-26) 2605浏览 0评论942个赞
本示例说明了如何解决四连杆机构(简单的平面闭合链机构)的逆运动学问题。 Robotics System Toolbox™不直接支持闭环机制。但是,可以使用运动学约束来近似……继续阅读 » 5年前 (2021-04-26) 3079浏览 0评论2738个赞
文章目录 bsplinepolytraj cubicpolytraj quinticpolytraj rottraj transformtraj trapveltraj 参考 ……继续阅读 » 5年前 (2021-04-26) 3006浏览 0评论457个赞
机器人轨迹规划:三次样条曲线文章目录机器人轨迹规划:三次样条曲线 <……继续阅读 » 5年前 (2021-04-26) 3461浏览 0评论2282个赞
写在前面首先要有个缓存的概念,参见知乎的这个话题,很有学习意义!机械臂是怎么保证速度平滑且位置精确的?http……继续阅读 » 5年前 (2021-04-26) 2874浏览 0评论973个赞