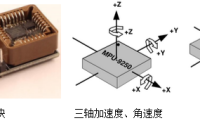
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2781浏览 0评论1804个赞
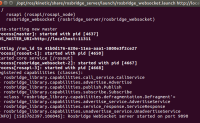
有的时候我们希望在别人已有的数据集上做开发,或者复现之前已经构建好的场景数据,这时候就可以用ROS2中的ros2 bag工具啦。 ros2 bag是一个命令行工具,可以实现对ROS2系统中话题数据的录制和回放,选定的数据会被打包放到一个数据库文件中,未来使用该工具即……继续阅读 » 古月 5年前 (2021-04-26) 3927浏览 0评论1963个赞
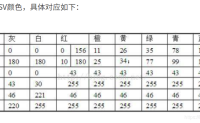
原图像: ……继续阅读 » 一三五 5年前 (2021-04-26) 2573浏览 0评论1459个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1867浏览 0评论1429个赞
前言 《ros机器人编程实践》— 第五章动作的定义。 前面尝试了定义自己的消息类型和服务,接下来是定义动作。服务只适用于及时响应的消息类型,和编程的函数基本类似,有自己的输入输出。但是在解决机器人运作问题上服务显然就不够用了,就好比投篮,我们用服务来写只能做到写……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3611浏览 0评论1259个赞
前言 《ros机器人编程实践》第六章机器人与仿真 子系统概念 子系统:机器人通过建立子系统的方法来简化设计和分析过程。 执行子系统:直接与机器人轮子或者机械臂交互感知子系统:直接与传感器交互……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1839浏览 0评论1238个赞
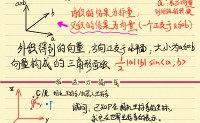
不同于之前发布的文章。我将使用一种全新的方式,iPad Notability+Blog的方式打开这个板块的大门。原因有两个: (1)Notability更方便手写长公式,也方便手绘坐标系变换等等; ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2590浏览 0评论650个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2701浏览 0评论1158个赞
注:本篇博文全部源码下载地址为:Git Repo传送门……继续阅读 » Shawn0102 5年前 (2021-04-26) 2598浏览 0评论962个赞
ROS2中的工作空间类似我们常说的概念——“工程”,是我们在ROS中开发具体项目的空间,所有功能包的源码、配置、编译都在该空间下完成。 我们可能会同时开发多个项目,就会产生多个工作空间,所以工作空间之间也有一个层次的问题,类似于优先级的概念,比如不同工作空间中有同名……继续阅读 » 古月 5年前 (2021-04-26) 2212浏览 0评论2949个赞
文章简述:本文主要讲述笔者在进行基于ROS的机器视觉开发中涉及到的相机驱动配置问题,讲述如何安装Realsense的相机驱动以及相机与ROS支持的功能包,并针对安装过程中出现的错误进行分析并提供相应的解决方案。 ……继续阅读 » 吴凯荣 5年前 (2021-04-26) 2794浏览 0评论172个赞
前言 国赛篇的第一期我们实现了最基础的多点导航,并利用rviz标定分段目标点进行导航。但是官方补充完规则之后,这个方案就无法用来进行完成比赛了。……继续阅读 » 小白 5年前 (2021-04-26) 2920浏览 0评论2719个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2030浏览 0评论486个赞
前言 本文目标,史上最全,入门最简。工程链接:下载地址 这一节参考书上的例子,用gazo……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2693浏览 0评论1611个赞
功能包是ROS2中组织代码的基本容器,方便我们编译、安装、分发开发的代码,一般来讲,每个功能包都是用来完成某项具体的功能相对完整的单元。 ROS2中的功能包可以使用CMake或者Python两种方式来编译,其本身是一个“文件夹”,但和文件夹不同的是,每个功能包中都会……继续阅读 » 古月 5年前 (2021-04-26) 1894浏览 0评论2929个赞
vSLAM的数学铺垫。 1. 点与坐标系 <……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 4432浏览 0评论2477个赞
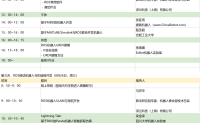
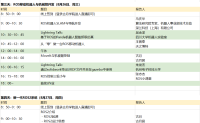
中国机器人操作系统(ROS)暑期学校自2015年举办以来,被ROS开源基金会誉为除了ROSCon之外的规模最大、参与人数最多、最成功的ROS线下活动。过去五年间,中国机器人操作系统(ROS)暑期学校共吸引了全国2……继续阅读 » 古月居官方 5年前 (2021-04-26) 2667浏览 0评论683个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3360浏览 0评论1923个赞
ROS2计算图中的每个节点都各司其职的在运行某个功能单元,节点之间也难以避免会有数据的传输,也就是通过我们之前介绍的话题和服务实现通信。之前我们已经通过命令行实现过话题的发布和订阅,本篇我们就来尝试下如何通过C++代码来实现发布者和订阅者。 1.创建功能包……继续阅读 » 古月 5年前 (2021-04-26) 2615浏览 0评论1431个赞
注:本篇博文全部源码下载地址为:Git Repo。 ……继续阅读 » Shawn0102 5年前 (2021-04-26) 1599浏览 0评论457个赞
功能包地址:https://download.csdn.net/download/qq_42145185/12256533 <……继续阅读 » 很不专业 5年前 (2021-04-26) 1985浏览 0评论1348个赞
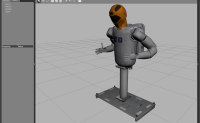
前言 注意:因为版本原因没能成功操作R2,还在探索阶段,这里只是记录安装过程。 NASA的R2机器人已经在空间站成功的部署了,可是这个开源机器人在ros平台上的资源很少,估计都被人遗忘了,R2机器人拥有两条机械臂以……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3303浏览 0评论2555个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2660浏览 0评论1881个赞
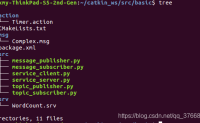
上一篇我们通过C++实现了发布者和订阅者,本篇我们试试用Python来实现同样的功能。 1.创建功能包 首先我们在之前创建的dev_ws工作空间中来创建一个放置节点代码的功能包。 打开一个新的终端,cd到dev_ws/src目录下,……继续阅读 » 古月 5年前 (2021-04-26) 3111浏览 0评论2261个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 今天的直播内容可以回看视频啦,登录古月学院进入今天的直播间即可回看。……继续阅读 » 古月居官方 5年前 (2021-04-26) 1768浏览 0评论2643个赞
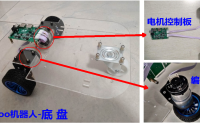
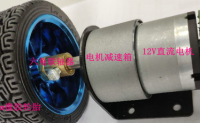
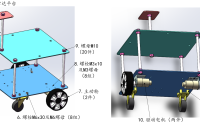
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1890浏览 0评论2377个赞
本机器人机械结构设计相关的所有设计文件下载地址为:……继续阅读 » Shawn0102 5年前 (2021-04-26) 1695浏览 0评论1517个赞
之前只是简单了解RANSAC模型,知道它是干什么的。然后今天有个课程设计的报告,上去讲了一下RANSAC,感觉这个东西也没那么复杂,所以今天就总结一些RASAC并用Python实现一下直线拟合。 ……继续阅读 » 一三五 5年前 (2021-04-26) 2175浏览 0评论2237个赞
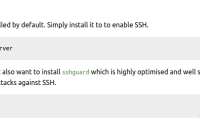
我看了网上很多的教程,不过一直僵持了很久都没能成功,今天偶然成功了,分享一下成功的经验。因为网上很多都是Ubuntu和树莓派系统的SSH搭建,也为使用TurtleBot的机器人爱好者一个成功的案例吧。 相信大家都做过不少尝试了,之前发布过……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2306浏览 0评论1769个赞
功能包下载链接:https://download.csdn.net/download/qq_42145185/12265062 ……继续阅读 » 很不专业 5年前 (2021-04-26) 1908浏览 0评论1182个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 每天24:00前进入当天的直播间……继续阅读 » 古月居官方 5年前 (2021-04-26) 2376浏览 0评论2525个赞
玩过手机摄影的小伙伴都有这样的体会:有的时候照片会拍歪;还有时会因为视野的缘故,无法拍到眼前的完整图像,无法还原美景。这些在计算机视觉中,其实都有解决方案,而方案的核心,就是我们需要介绍的投影几何。 老规矩,还是先了解些基本概念: ……继续阅读 » Z 5年前 (2021-04-26) 2263浏览 0评论1872个赞
从单幅图,到两幅图甚至多幅图,计算机视觉正在完成越来越多不可思议的事情。今天的主角——对极几何,通常用来解决双眼匹配搜索对应点的问题。近几年大火的视觉里程计,就离不开它的身影,老规矩,我们还是先了解下几个基本概念: ……继续阅读 » Z 5年前 (2021-04-26) 2737浏览 0评论2642个赞
学习打开摄像头捕获照片、播放本地视频、录制视频等。 目标: 打开摄像头并捕获照片 播放本地视频,录制视频 OpenCV函数:cv2.VideoCapture(), cv2.Vid……继续阅读 » 一三五 5年前 (2021-04-26) 2369浏览 0评论323个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2495浏览 0评论1845个赞
一、概述 所谓嵌入式,其实就是专用的微型计算机系统,包括嵌入式硬件和嵌入式软件两个部分。嵌入式硬件通常是由32位(或以下)的微处理器及其相关外设组成;嵌入式软件则是写入嵌入式硬件的用于实现特定功能的程序。笔者总结了一下,嵌入式具……继续阅读 » Shawn0102 5年前 (2021-04-26) 1779浏览 0评论1974个赞
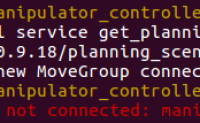
一、IKFAST 简介 IKFAST是一种基于解析算法的运动学插件,可以保证每次求解的一致性。……继续阅读 » Steve_long 5年前 (2021-04-26) 3268浏览 0评论1739个赞
……继续阅读 » Steve_long 5年前 (2021-04-26) 2487浏览 0评论731个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 每天24:00前进入当天的直播间……继续阅读 » 古月居官方 5年前 (2021-04-26) 2068浏览 0评论1028个赞
效果 ……继续阅读 » 很不专业 5年前 (2021-04-26) 3091浏览 0评论1912个赞
……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1647浏览 0评论1312个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2033浏览 0评论2852个赞
一、ArUco简介 ……继续阅读 » Shawn0102 5年前 (2021-04-26) 2868浏览 0评论670个赞
前言 紧张刺激的ROS组全国总决赛于26号落下了帷幕。我也有幸能够前往现场参赛体验一番。下面给大家带来一些现场的照片,视频,末尾会对路径算法进行……继续阅读 » 小白 5年前 (2021-04-26) 2742浏览 0评论2805个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 每天24:00前进入当天的直播间学习即签到成功,连续签到6天,即可获得领取……继续阅读 » 古月居官方 5年前 (2021-04-26) 3237浏览 0评论619个赞