原作者:Evan Ackerman 文章来源:IEEE Spectrum 编译:沈永强 ……继续阅读 » 古月 5年前 (2021-04-26) 2151浏览 0评论999个赞
注:本篇博文全部源码下载地址为:Git Repo。……继续阅读 » Shawn0102 5年前 (2021-04-26) 3688浏览 0评论2287个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2663浏览 0评论221个赞
小海龟(Turtlesim)是ROS2中一个非常重要的入门级例程,通过海龟仿真,我们可以了解到很多ROS2的底层原理,涉及节点、话题、服务等核心概念。 1.安装海龟仿真器Linux:……继续阅读 » 古月 5年前 (2021-04-26) 2140浏览 0评论1184个赞
pytorch 利用tensorboard显示loss,acc曲线等 运行环境: python3.6.9 pytor……继续阅读 » 一三五 5年前 (2021-04-26) 3445浏览 0评论953个赞
注:本篇博文全部源码下载地址为:……继续阅读 » Shawn0102 5年前 (2021-04-26) 3694浏览 0评论1085个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3234浏览 0评论1225个赞
和ROS1一样,ROS2中的各项资源也是通过计算图(“ ROS (2) graph”)联系到一起的。计算图是一个由各种ROS2元素组成的网络,共同完成数据的传输,其中每一个完成具体功能的模块称之为“节点”(Node),例如控制车轮速度、获取雷达数据等,节点之间通过话题(Topic……继续阅读 » 古月 5年前 (2021-04-26) 2023浏览 0评论267个赞
前言 记录下学习过程,《ros机器人编程实践》第三章第一个例子讲的不是很清楚……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1871浏览 0评论1631个赞
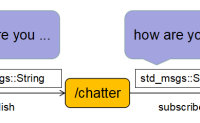
大道至简,ROS2将复杂的机器人系统拆解成许多模块节点,而这些节点之间则是通过一个至关重要的通道完成数据交换的,这个通道就是“话题”。……继续阅读 » 古月 5年前 (2021-04-26) 3320浏览 0评论663个赞
……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3151浏览 0评论793个赞
原作者:Michael Ferguson 文章来源:The Robot Report 编译:沈永强 ……继续阅读 » 古月 5年前 (2021-04-26) 1986浏览 0评论1736个赞
前言 《Ros机器人编程实践》第三章例程二定义虚数数据类型。 实现过程 创建工作区参见上一章博客: ros机器人编程……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2627浏览 0评论1509个赞
pointnet训练文件pointnet/sem_seg/train.py注释 原文如下: import argp……继续阅读 » 一三五 5年前 (2021-04-26) 3423浏览 0评论2776个赞
注:本篇博文全部源码下载地址为:Git Repo……继续阅读 » Shawn0102 5年前 (2021-04-26) 2074浏览 0评论823个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1664浏览 0评论795个赞
嗨,又和大家见面了!上次我们在《Webots建模指南3 -ROS控制篇(上)》这篇文章中梳理了Webots与ROS的通信过程,今天我就来带大家一起实操一下,看看Webots怎样实现ROS联合……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3671浏览 0评论736个赞
原作者:Evan Ackerman 文章来源:IEEE Spectrum 编译:沈永强 ……继续阅读 » 古月 5年前 (2021-04-26) 1903浏览 0评论100个赞
前言 本篇内容主要是解读ROS的国赛任务以及概述几种实现方案。也祝大家都能取得满意的成绩呀~ ……继续阅读 » 小白 5年前 (2021-04-26) 2801浏览 0评论1462个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2049浏览 0评论1059个赞
效果: 卡顿现象严重,初步显示还行,后期需要寻找其他显示方法 ……继续阅读 » 一三五 5年前 (2021-04-26) 2790浏览 0评论1348个赞
CMake的使用简介和补充知识内容概要认识CMake及应用 应用,与Gcc,Makefile……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1925浏览 0评论1785个赞
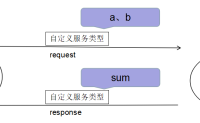
之前讲的话题通信是基于订阅/发布机制的,无论有没有订阅者,发布者都会周期发布数据,这种模式适合持续数据的收发,比如传感器数据。机器人系统中还有另外一些配置性质的数据,并不需要周期处理,此时就要用到另外一种ROS通信方式——服务(Service)。 服务是基于客户端/……继续阅读 » 古月 5年前 (2021-04-26) 3267浏览 0评论346个赞
距离我签约古月居已经过去了一个月了,博主因为在这一个月的时间里琐碎的事情非常的多,所以也推迟了我发博客的时间。……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 1997浏览 0评论1706个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1772浏览 0评论2519个赞
前言 在ros中定义一个服务,计算字符串中单词的数量 ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2970浏览 0评论1209个赞
注:本篇博文全部源码下载地址为:Git Repo……继续阅读 » Shawn0102 5年前 (2021-04-26) 2327浏览 0评论2008个赞
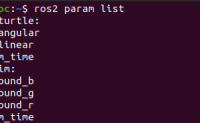
参数也是ROS2中很重要的一个概念,主要作用是对节点功能的配置,在ROS2中,每个节点都有自己的参数,这些参数可以用整型数、浮点数、布尔型数、字符串和列表来描述。 依然是以小海龟仿真器为例,看看里边有哪些参数。 1.启动小海龟仿真器……继续阅读 » 古月 5年前 (2021-04-26) 2996浏览 0评论1786个赞
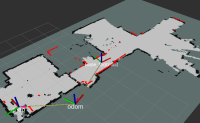
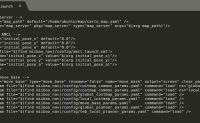
前言 前面一章已经完成了turtlebot3的仿真操作以及slam导航,这一节将实现脚本控制turtlebot3在多点之间来回导航。工程链接:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3290浏览 0评论1254个赞
今天给大家普及一下ESP8266的开发环境和VScode Arduino的开发环境配置。 我们这一系列的ESP8266开发都是基……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2541浏览 0评论877个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2559浏览 0评论2068个赞
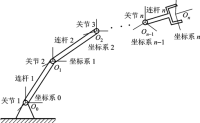
一、概述 机器人运动学研究的是机械臂各个连杆之间的位移关系、速度关系和加速度关系。比较经典的一本书推荐大家读读熊有伦的《机器人技术基础》……继续阅读 » Shawn0102 5年前 (2021-04-26) 3181浏览 0评论609个赞
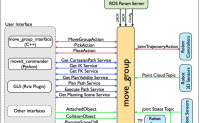
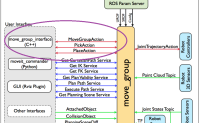
之前介绍到的话题和服务是ROS中最重要的两种底层通信机制,但也并不是说能解决所有应用层的问题,举一个例子,如果要让机械臂抓取一个物体,我们不仅要发出指令,还需要获取机械臂的实时反馈,如果直接用话题和服务也可以实现,不过一下得上好几个,有点麻烦。 所以针对类似的场景,……继续阅读 » 古月 5年前 (2021-04-26) 2244浏览 0评论139个赞
先挖个坑:实现基于python的DFS,BFS ……继续阅读 » 一三五 5年前 (2021-04-26) 2298浏览 0评论1744个赞
上一篇,我们讲完了RRT,这回我们来讲运动规划入门系列的最后一个算法——人工势场法。回想当时我第一次听说人……继续阅读 » tloinny 5年前 (2021-04-26) 3032浏览 0评论1557个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1735浏览 0评论1073个赞
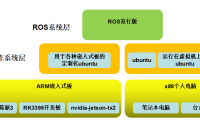
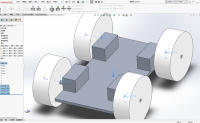
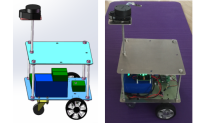
一、是什么开源项目? 从本博文开始将开源一个基于ROS系统的自主移动机器人项目,该项目基于一个差动轮机器人平台展开,机器人的设计效果图和实物图如下图1所示。 ……继续阅读 » Shawn0102 5年前 (2021-04-26) 3347浏览 0评论2426个赞
先放张效果图,(*^__^*) 嘻嘻…… ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1996浏览 0评论2224个赞
在终端中运行ROS2节点时,节点的日志信息会在终端中显示出来,但是这种方式呈现的日志比较凌乱,所以ROS2提供了一个专门用于管理日志信息的可视化工具——rqt_console。今天我们就来看看这个工具是如何使用的。 1.启动 首先打开……继续阅读 » 古月 5年前 (2021-04-26) 2957浏览 0评论2637个赞
之前关于机械臂的教程《ROS机械臂控制之跟踪二维码<……继续阅读 » 神秘老铁 5年前 (2021-04-26) 2096浏览 0评论2631个赞
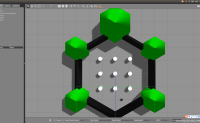
matplotlib生成三维点云包围盒 运行环境: win10、 python3.5.2、 matplotlib 评价:消耗时间较长 效果展示: ……继续阅读 » 一三五 5年前 (2021-04-26) 3144浏览 0评论2488个赞
在开始介绍本开源项目的机械结构设计之前,先和博友们用一篇博文分享一下机械设计工作相关的特点、性质。抛出结论:笔者觉得在机器人领域,机械结构设计基本上是决定一个产品能否实现或超预期实现预设功能的关键之一,因为一切上层软硬件都是基于机械本体完成的。 一、机械……继续阅读 » Shawn0102 5年前 (2021-04-26) 3524浏览 0评论497个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2571浏览 0评论1597个赞
到现在为止,每次启动一个ROS2中的节点,我们都需要开启一个新的终端运行ros2 run指令,如果机器人系统中的节点很多,这样岂不是很麻烦。 ROS2针对这个问题,专门设计了launch启动文件,可以通过一个类似脚本的文件,一起启动多个节点并允许在文件中对节点进行配……继续阅读 » 古月 5年前 (2021-04-26) 2485浏览 0评论1022个赞
我们在机器人控制中见到的四元数……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1648浏览 0评论1090个赞