1. GPSfrom controller import Robotfrom……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3194浏览 0评论2851个赞
1.背景介绍 因为疫情原因,在家上网课。因为放假前完全没有想到会放如此长的‘假’,所以我把所有学习用的开发板、硬件、开发教程书籍都放在了学校实验室里,从而现在不但不能在家做实物,也不能去学校做实物的尴尬情形。随后因为一门课(计算机控制技术)改变了这种尴尬的情形。……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2827浏览 0评论1086个赞
又和大家见面了!今天跟大家聊聊Webots是如何跟ROS联合仿真的,话不多说,直接进入正题~ 1.开餐前的准备 关于仿真环境和机器人……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3874浏览 0评论1760个赞
小伙伴们似乎对RRT有种莫名的期待,从大概四个月前,我第一次更新运动规划入门系列的时候就有小伙伴催着要看RRT了,那么今天就满足你们。 书接上回,我们上次讲完了PRM,我们知道PRM是一个概率完备,但是非最优的路径规划算法。所谓概率完备,意思就是说假如在规划的起点和……继续阅读 » tloinny 5年前 (2021-04-26) 3374浏览 0评论1482个赞
ROS学习(问题)笔记一、安装Ubuntu; ……继续阅读 » lovely_him 5年前 (2021-04-26) 3357浏览 0评论2723个赞
一年前,我在1Z实验室1zlab.com上线了一门《机械臂运动学控制及Python实现》。那个时候我刚刚开始学习机器人学,理解的层次还比较浅,经过了一年的积累,又有了继续完善升级课程的想法。 思考了许久,决定将……继续阅读 » 阿凯 Kyle 5年前 (2021-04-26) 1673浏览 0评论2734个赞
概要 上一讲我们在……继续阅读 » 阿凯 Kyle 5年前 (2021-04-26) 3055浏览 0评论1566个赞
前言 系列教程一:仿真赛教程一<……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2020浏览 0评论1328个赞
背景介绍 首先我的环境是POP!OS18。PopOS(即 Pop!_OS)是知名 Linux 电脑制造商 System7……继续阅读 » 谦墨 5年前 (2021-04-26) 3004浏览 0评论1498个赞
给定一个立方体模型,通过深度相机将模型点云提取出来并保存为模板,然后在不同位置进行拍摄,能够将模型信息复原出来吗? 答案肯定是可以的,借助于相机投影模型的……继续阅读 » Z 5年前 (2021-04-26) 2945浏览 0评论968个赞
文件讲解 Gazebo中进行算法仿真首先需要启动世界模型,通过launch文件实现模型与代码的交互,launch文件中整合了world文件和其他launch文件使其同时运行在Gazebo中;world文件是整合模型的文件,可以直接调用模型或者直接编写模型相关的参……继续阅读 » RedGlass 5年前 (2021-04-26) 2915浏览 0评论2943个赞
Movebase的源码安装 Movebase源码位于Navigation包中,大家可在……继续阅读 » RedGlass 5年前 (2021-04-26) 2558浏览 0评论709个赞
本文转载自The Construct,原作者 Ricardo Tellez 原文链接:https://www.theconstructsim.com/top-10-influential-people-in-ros/……继续阅读 » 古月居官方 5年前 (2021-04-26) 2706浏览 0评论1724个赞
最常见的移动机器人模型,差速,麦克纳姆轮的全向,阿克曼车式等。 ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2412浏览 0评论292个赞
前言这是我在古月居的第一篇文章,我想介绍一下我们组去年的参赛经历,以及整个做比赛的过程。内含干货,包括我们控制算法的设计思路等~~结尾……继续阅读 » 小白 5年前 (2021-04-26) 3501浏览 0评论1341个赞
Turtlebot驱动是运行turtlebot机器人的必备文件,很多同学想要更改一些参数却找不到文件包,那就是安装的方法或者对包的理解不够。 二进制安装……继续阅读 » RedGlass 5年前 (2021-04-26) 3321浏览 0评论1826个赞
相信大家在编译运行某个节点文件经常会出现节点文件无法被找到的情况,或者在运行时不知道文件的位置、不知道该如何监听数据来进行调试等问题。 为了方便大家更熟悉ROS的操作,同时方便大家的调试,本次更新一起关于ROS常用package、bag、Node、Topic、Ser……继续阅读 » RedGlass 5年前 (2021-04-26) 2034浏览 0评论1268个赞
前言 在ROS librviz 人机交互软件开发系列教程中我们实现了Ubuntu端的界面开发。但是很多小伙伴问到能不能在Windows上进行开发……继续阅读 » 蒋程扬 5年前 (2021-04-26) 3003浏览 0评论712个赞
前言 本来这期内容是讲解我们设计的仿真思路的,但是为了不影响比赛公平性,这部分内容就放在提交代码之后啦~~ 这两天很多同学问了我很多问题,其中比……继续阅读 » 小白 5年前 (2021-04-26) 3356浏览 0评论513个赞
平台:ubuntu18.04、TX2、Python3.6 写在前面 目前经过测试TX2上是带有串口通讯驱动的,我们只需要设置一下即可。本次主要讲解如何使用USB转RS232的串口通讯。 由于USB转RS232可使用不同的芯片,自然包含各种各样的驱……继续阅读 » 一三五 5年前 (2021-04-26) 1812浏览 0评论2770个赞
需求:TX2连接Lidar获取点云数据,由于TX2安装在机器人上,不能外接屏幕,内存ROM也很小,所以采用TX2与雷达建立通讯,然后建立TX2和PC机的ROS远程通讯(PC机和TX2都安装ubuntu18.04) PC机和TX2全部为系统为18.04,ROS版本全部为melodi……继续阅读 » 一三五 5年前 (2021-04-26) 2674浏览 0评论2884个赞
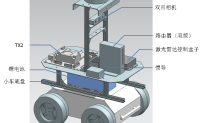
1、试验车的结构设计 试验车三维结构示意图如图1所示。试验车采用铝合金支架连接,因铝合金质量较轻,不仅可满足试验车最大承重要求,采用支架结构还有利于以后的试验车结构上的扩展。试验车上包含的传感器有:三维激光雷达、惯导、路由器、T……继续阅读 » 一三五 5年前 (2021-04-26) 2287浏览 0评论1571个赞
……继续阅读 » Nikii 5年前 (2021-04-26) 1676浏览 0评论2675个赞
多机器人协同编队需要将理论和实践紧密地结合起来,其应用包括编队队形生成、保持、变换和路径规划与避障等等都是基于图论的理论基础完成的。 图论基础 控制协同多智能体动态系统是通过通信图进行相互联系的动力学问题,通信图表明了各个节点之间的信息流。协同控……继续阅读 » RedGlass 5年前 (2021-04-26) 2259浏览 0评论2722个赞
Gmapping包提供了基于激光雷达的SLAM的方法,你可以通过一个移动机器人的激光雷达数据和位置数据来创建一个2D的栅格地图。 For more information, please click ……继续阅读 » RedGlass 5年前 (2021-04-26) 2087浏览 0评论2984个赞
运行环境: ubuntu18.04、python3.6、tkinter 运行效果: 开机之后自动打开teminal并执行设定好的程序,进入系统后每次打开terminal都会执行一次设定的程序。……继续阅读 » 一三五 5年前 (2021-04-26) 2990浏览 0评论2004个赞
1、卸載低版本 先查看是否已經安裝cmake cmake --version 如果安裝了,並……继续阅读 » 一三五 5年前 (2021-04-26) 2382浏览 0评论975个赞
两者的区别 二进制包是直接通过apt方式安装了ROS相关的软件包,而我们在GitHub上下载自己需要的源码来进行代码复用,编译通过生成可运行节点后的包是源码包,两者是可以共存的,但是运行时只能运行bash/zsh文件中默认环境下的包……继续阅读 » RedGlass 5年前 (2021-04-26) 1664浏览 0评论2507个赞
棋盘格,我们通常拿来做标定用,但如果可以有这样的效果,是不是感觉高级那么一点点? 在这之前,我们还是先了解几个基本概念: <……继续阅读 » Z 5年前 (2021-04-26) 3233浏览 0评论617个赞
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3512浏览 0评论1968个赞
Ubuntu18.04安装ROS的版本为ros-melodic Ubuntu16.04安装ROS的版本为ros-kinetic……继续阅读 » 一三五 5年前 (2021-04-26) 1667浏览 0评论2233个赞
多机器人协同编队需要将理论和实践紧密地结合起来,其应用包括编队队形生成、保持、变换和路径规划与避障等等都是基于图论的理论基础完成的。 详细请参考《……继续阅读 » RedGlass 5年前 (2021-04-26) 3292浏览 0评论2688个赞
安装软件源 包安装方法主要有两种:软件源安装和源码编译安装。软件源(Repository)为系统提供了一个庞大的应用程序仓库,只要通过简单的命令即可从仓库中找到需要安装的软件并完成下载安装。相反,源码编译安装相对来说比较复杂,需要手动解决软件的依赖关系。……继续阅读 » 一三五 5年前 (2021-04-26) 2432浏览 0评论859个赞
rosbag既可以指命令行中数据包相关命令,也可以指 c++/pythond的 rosbag 库。……继续阅读 » 一三五 5年前 (2021-04-26) 2322浏览 0评论1733个赞
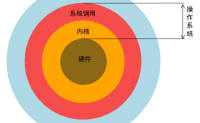
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码;而ROS又是安装在Linux发行版ubuntu系统之上的,先学一些Linux命令行相关的知识,对后续ROS教程的快速上手……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3636浏览 0评论1543个赞
第十五届全国大学生智能车竞赛 ……继续阅读 » 古月居官方 5年前 (2021-04-26) 2323浏览 0评论366个赞
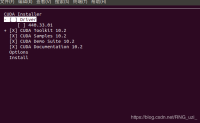
修正:Ubuntu 18.04+RTX2080Ti建议安装cuda10.0,cudnn7.5.1,pytorch1.4.0+cu100 / torchvision0.5.0+cu100,tensorflow-gpu1.14.0 修正日期:20200611 安装方式与……继续阅读 » 一三五 5年前 (2021-04-26) 2929浏览 0评论2387个赞
前言 本篇主要介绍我们队今年参赛的方案以及搭建过程,这篇本来是赛前一周就写好了的,不过还是等到赛后再来发了。体验完比赛,不得不感叹一下,大佬是真……继续阅读 » 小白 5年前 (2021-04-26) 2585浏览 0评论1017个赞
摘要 由于机器人SLAM、自动导航、语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码;而ROS又是安装在Linux发行版ubuntu系统之上的,先学一些Linux命令行相关的知识,对后续ROS教程的快速上手……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2274浏览 0评论383个赞
1. 设置编码sudo locale-gen en_US en_US.UTF-8sudo update-locale LC_ALL=en_U……继续阅读 » 古月 5年前 (2021-04-26) 2131浏览 0评论530个赞
前言: 本文中,主要是关于OpenCV格式图片(或视频帧)和ROS数据格式图片(或视频帧)之间的转换。或者直白点书,通过ROS发送图片(Image)数据类型的消息(message)。 本文其实是为……继续阅读 » 一三五 5年前 (2021-04-26) 2895浏览 0评论823个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2028浏览 0评论2321个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1892浏览 0评论616个赞
workspace是ROS2中的工作空间,也是我们开发机器人代码的位置。 ROS2安装的系统目录称之为“underlay”,我们自己创建的工作空间称之为“overlay”,在一台电脑上往往有多个工作空间。我们可以通过source不同空间的环境变量脚本来更换所使用的w……继续阅读 » 古月 5年前 (2021-04-26) 3484浏览 0评论1021个赞
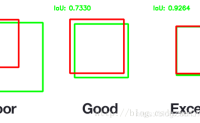
1. IOU(Intersection over Union) -交并比 IOU是一种测量在特定数据集中检测相应物体准确度的一个标准。在PASCAL VOC chall……继续阅读 » 一三五 5年前 (2021-04-26) 2235浏览 0评论2807个赞