在2015年,DARPA举办了一届机器人挑战赛(DARPA Robotics Challenge)。23只进入决赛的队伍中,有18支队伍使用ROS,有14支队伍利用Gazebo进行仿真,ROS取得非凡的成绩。……继续阅读 » 张新宇 5年前 (2021-04-26) 2874浏览 0评论1073个赞
MoveIt! 第一次看到这个名字可能会觉得很奇怪,名字是怎么来的,怎么还有一个感叹号?如果大家了解一个专门负责抓取的软件叫GraspIt!,就不会觉得特别奇怪了。MoveeIt!源于ROS的机械臂导航(arm_navigation)软件包,但是MoveIt!的创始团队希望……继续阅读 » 张新宇 5年前 (2021-04-26) 3169浏览 0评论321个赞
TurtleBot是一款移动机器人,特点是便宜。TurtleBot带有摄像头和移动底盘,可以用于研究机器人的导航问题:即机器人决定往哪个方向走,怎么走,怎么绕过障碍物,最终到达目的地。不少ROS的初学者是在TurtleBot的陪伴下学习的机器人编程的。以至于一些人想方设法能……继续阅读 » 张新宇 5年前 (2021-04-26) 2134浏览 0评论732个赞
上一篇,已经在Gazebo 9中放入了一个支持ROS 2的仿真机器人,具体参考:使用机器人操作系统ROS 2和仿真软件Gazeb……继续阅读 » zhangrelay 5年前 (2021-04-26) 3351浏览 0评论1283个赞
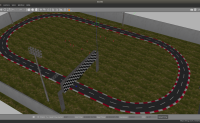
一、前言 之前的教程使用Python代码实现了四轮车的巡线,阿克曼模型确实在方仿真上效果都好多了,今天教大家将代码从python修改成……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1768浏览 0评论2769个赞
……继续阅读 » 小明工坊 5年前 (2021-04-26) 2991浏览 0评论1434个赞
说到TurtleBot,就要说背后的男男女女。 前文说过,TurtleBot是图利·弗特(Tully Foote)和麦罗尼·威瑟(Melonee Wise)发明的,而且软硬件开源,最早的使用者是Google。&……继续阅读 » 张新宇 5年前 (2021-04-26) 2052浏览 0评论954个赞
……继续阅读 » 小明工坊 5年前 (2021-04-26) 1963浏览 0评论432个赞
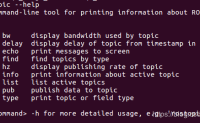
课程目的 ROS使用过程中,涉及许多命令和终端的……继续阅读 » 古月居官方 5年前 (2021-04-26) 2181浏览 0评论751个赞
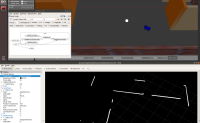
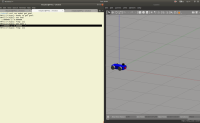
在完成教程(一)搭建机器人和(二)命令遥控可视化后,将仿真机器人用于更为逼真的环境,可以测试如……继续阅读 » zhangrelay 5年前 (2021-04-26) 2300浏览 0评论1136个赞
TurtleBot的另外一位发明人、创始人是图利·弗特(Tully Foote)。 图利·弗特本科就读于加州理工学院(California Institute of Technology),硕士研究生毕业于宾夕法尼亚大学(Uni……继续阅读 » 张新宇 5年前 (2021-04-26) 2264浏览 0评论2748个赞
前言……继续阅读 » 小明工坊 5年前 (2021-04-26) 2651浏览 0评论879个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时)……继续阅读 » 小明工坊 5年前 (2021-04-26) 2613浏览 0评论204个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 小明工坊 5年前 (2021-04-26) 2920浏览 0评论2002个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 小明工坊 5年前 (2021-04-26) 2614浏览 0评论2495个赞
目标跟踪可以使用激光或视觉传感器,本节开始只提供思路,无教程,供有兴趣的朋友自主实践。激光测距视觉识别融合技术……继续阅读 » zhangrelay 5年前 (2021-04-26) 2058浏览 0评论677个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 小明工坊 5年前 (2021-04-26) 3029浏览 0评论1658个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时)……继续阅读 » 小明工坊 5年前 (2021-04-26) 3410浏览 0评论1384个赞
原作者:Jorge Nicho文章来源:The Robot Report……继续阅读 » 古月 5年前 (2021-04-26) 2249浏览 0评论2158个赞
引言本教程连载一辆能够用 ROS 控制的带摄像头的小车,用 ROS 发布图像数据,对获取到的图像进行处理,如目标检测。本篇文章主要介绍如何把本教程后面的内容汇聚起来,实现一个能目标检测的小车。 ……继续阅读 » RT-Thread 5年前 (2021-04-26) 2452浏览 0评论1054个赞
TurtleBot非常受欢迎,全球卖出了上千台TurtleBot。这是两位创始人始料未及的。 究其原因是,所有好一点的机器人都太贵了,自己设计开发一款机器人也太贵了,太费时了。 Tu……继续阅读 » 张新宇 5年前 (2021-04-26) 1679浏览 0评论309个赞
在第三个和第四个案例中,我们依然只使用了一个机器人,毕竟室内环境比较小,为了增加趣味性和竞技效果,通常环境中可以有多个机器人要么竞争或协作完成任务,本实践选用如下场景(aws_bookstore): ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2212浏览 0评论2306个赞
嗨伙计们,月更侠罗伯特祥又来和大家见面了!今天我们来聊一聊Webots中关于机器人建模的那点事儿,相信有了前面的基础,今天的文章对你来说So easy!话不多说,我们来看看怎么玩儿吧~1.四轮差速小车建模环境建模我们就略过去了,直接上……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2968浏览 0评论1701个赞
smimport_implementation Invalid file type ‘.urdf’. Can only import Physical Modeling XML files.出错 smimport (line 132)……继续阅读 » NICE 5年前 (2021-04-26) 2393浏览 0评论994个赞
工业感知公司(Industrial Perception, Inc.,简称IPI),是柳树车库孵化的另一家公司,从2012年起从柳树车库独立出来。面向未来电子商务物流,利用视觉技术辅助货物的装卸,物品分拣,上下物料。 传统的机器……继续阅读 » 张新宇 5年前 (2021-04-26) 2086浏览 0评论2968个赞
2012年开始,车库启动了一个秘密项目PlatformBot,麦罗尼·威瑟领导PlatformBot团队。时至今日,也没有多少人听说过车库的这个PlatformBot项目。PlatformBot最初目标是建造售价10000美元的服务机器人, ……继续阅读 » 张新宇 5年前 (2021-04-26) 1752浏览 0评论2665个赞
前言这篇文档非常长所以我们会分成5篇来连载,因为机器学习并不是纯软件开发,简单地调用库函数 API,需要有一定的理论支撑,如果完全不介绍理论部分,可能就不知道为什么模型要这样设计,模型出了问……继续阅读 » RT-Thread 5年前 (2021-04-26) 2652浏览 0评论145个赞
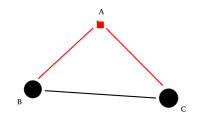
二维激光雷达是室内机器人最常用的距离传感器之一。 结合ROS暑期学校趣味竞赛案例,思考完成如下算法:读取环境基本特征识别特征给出一些关键值……继续阅读 » zhangrelay 5年前 (2021-04-26) 3396浏览 0评论846个赞
维护ROS成立的开源机器人基金会,一直以来都遭受着来自资本市场的诱惑。2016年,开源机器人基金会(OSRF)接受了丰田研究院(TRI)一百万美金善款,这是一笔非常大的捐助。然而,这笔捐款在ROS圈引起了非常大的担忧,因为OSRF与丰田研究院建立了一个以盈利为目的开源机器人……继续阅读 » 张新宇 5年前 (2021-04-26) 2873浏览 0评论1812个赞
柳树车库非常重视在机器人领域的影响力,为了进一步提高这种影响力,柳树车库一开始就在全球大学里推进实习生计划,该计划前后共吸引了超过130名的实习生。 很多机器人领域的学生以能到柳树车库实习为荣。随着柳树车库的名气不断增加,那些在……继续阅读 » 张新宇 5年前 (2021-04-26) 3002浏览 0评论1871个赞
在ROS2课程中已经学过并掌握了一个基本的发布器和订阅器(C++),官网的教程全部掌握大致需要20分钟吧。 这过程包括:创建一个功能包编程实现一个发布节点……继续阅读 » zhangrelay 5年前 (2021-04-26) 2909浏览 0评论2340个赞
上期回顾:……继续阅读 » RT-Thread 5年前 (2021-04-26) 2374浏览 0评论396个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 2132浏览 0评论858个赞
从“柳树车库”直接衍生出的公司正在改变着世界。一些前期的公司包括:hiDOF:机器人与自动化软件咨询公司,2013被Google收购。IPI(Industrial Perception Inc.):利用视觉辅助工业机械臂搬运货物,2013……继续阅读 » 张新宇 5年前 (2021-04-26) 2650浏览 0评论2265个赞
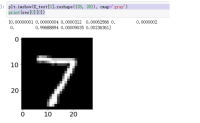
上期回顾: RT-Thread智能车目标识别系统连载教程——手写体……继续阅读 » RT-Thread 5年前 (2021-04-26) 3074浏览 0评论908个赞
ROS2在基本概念上与ROS1相似,但是实现上差别较大,比如编程规范等。上一节是主题实战,有兴趣可以编写代码实现机器人速度发布和坐标订阅。……继续阅读 » zhangrelay 5年前 (2021-04-26) 3198浏览 0评论2836个赞
磨蹭了好久终于开始写本行SLAM系列了。鄙人目前水平一般,但接下来的几年也都会在这个方向继续深入下去,所以打算尽我所能地写一个完整的SLAM从入门到精(fang)通(qi)的系列。文章的内容大概会分为三个大部分:&nb……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2660浏览 0评论2716个赞
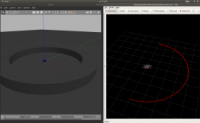
前言本文所使用的仿真软件是开源的Rotors包,仅供学习使用!然后这里说明下,只是个人爱好仿真下无人机玩玩,对官方给的无人机控制代码理……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2202浏览 0评论459个赞
本文参考Moveit官方教程,原文链接见文末。已经过本人踩坑验证:系统版本:ubuntu16.04ROS版本:Kinetic ……继续阅读 » 小明工坊 5年前 (2021-04-26) 3680浏览 0评论131个赞
前言 如果是第一次使用Moveit!,建议先按照 ……继续阅读 » 小明工坊 5年前 (2021-04-26) 2398浏览 0评论2357个赞
PX4无人机ROS下仿真开发OverviewSi……继续阅读 » bingobinlw 5年前 (2021-04-26) 1958浏览 0评论1254个赞
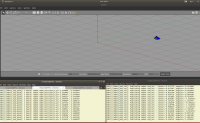
文件目录结构├─Annotation │ └─XML文件 ├─data │ ├─csv文件 │ └─Record文件 ├─images │ └─图片 ├……继续阅读 » white_Learner 5年前 (2021-04-26) 2005浏览 0评论777个赞
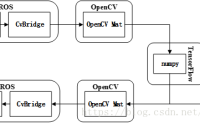
环境:Ubuntu16.04+Tensorflow-cpu-1.6.0+ROS Kinetic+OpenCV3.3.1前期准备:完成Object Detecti……继续阅读 » white_Learner 5年前 (2021-04-26) 1730浏览 0评论101个赞
相机标定是用于获取相机畸变,内参数和外参数的一个操作,是机器视觉中不可或缺的一个重要步骤。 畸变是相机因其自身成像特性无法避免产生的图像变形。内参数是对相机内部特性的描述,包括相机图像中心、相机焦距等。外参数描述的是相机在世界坐……继续阅读 » white_Learner 5年前 (2021-04-26) 3549浏览 0评论797个赞
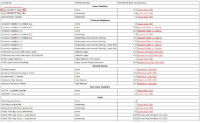
1 搭建无人机仿真环境 首先需要安装mavros,这是一个飞机固件与ros通信的包: ……继续阅读 » 神秘老铁 5年前 (2021-04-26) 3257浏览 0评论2965个赞