PX4无人机ROS下仿真开发
-
Overview
-
Simulation
-
Px4_control
-
Slam
-
Map
-
Image_process
-
Planning
-
Volans
项目地址volans
注:有任何疑问都可在issues提问:)
Simulation
此simulation 包含2D、3D激光雷达模型、深度相机模型、双目相机模型、realsense相机模型、IRlock相机模型。
-
配置PX4以及ros环境
-
编译工作空间,运行launch文件
配置PX4以及ros环境
建议安装Ubuntu18.04 ,gazebo9
这里给出ubuntu18.04安装步骤
ROS
for ubuntu18.04 melodic
-
添加ros源到 sources.list.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 sudo apt update -
安装的ros
sudo apt-get install ros-melodic-desktop # Source ROS echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc source ~/.bashrc并安装ros下gazebo9相关的包
sudo apt install ros-melodic-gazebo9* -
初始化ros.
rosdep init rosdep update -
安装catkin编译器.
sudo apt-get install ros-melodic-catkin python-catkin-tools -
安装mavros
参考于 . https://dev.px4.io/en/ros/mavros_installation.html
sudo apt install ros-melodic-mavros ros-melodic-mavros-extras -
安装mavros相关的 geographiclib dataset
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh chmod +x install_geographiclib_datasets.sh sudo ./install_geographiclib_datasets.sh
参考于:http://wiki.ros.org/melodic/Installation/Ubuntu
下载编译px4 Firmware
-
安装必要的工具链
-
下载编译firmware
安装必要的工具链
下载ubuntu.sh,requirements.txt
wget https://raw.githubusercontent.com/PX4/Firmware/master/Tools/setup/ubuntu.sh
wget https://raw.githubusercontent.com/PX4/Firmware/master/Tools/setup/requirements.txt
然后运行:
source ubuntu.sh
如果不进行px4代码的开发,只是进行ros下开发仿真的话,可以把ubuntu.sh里的INSTALL_NUTTX改为’false’,减少不必要的安装时间
INSTALL_NUTTX="false"
之间可能安装失败多次,请务必重新运行ubuntu.sh脚本,直至成功
参考于http://dev.px4.io/master/en/setup/dev_env_linux_ubuntu.html
下载源码:
git clone https://gitee.com/bingobinlw/volans
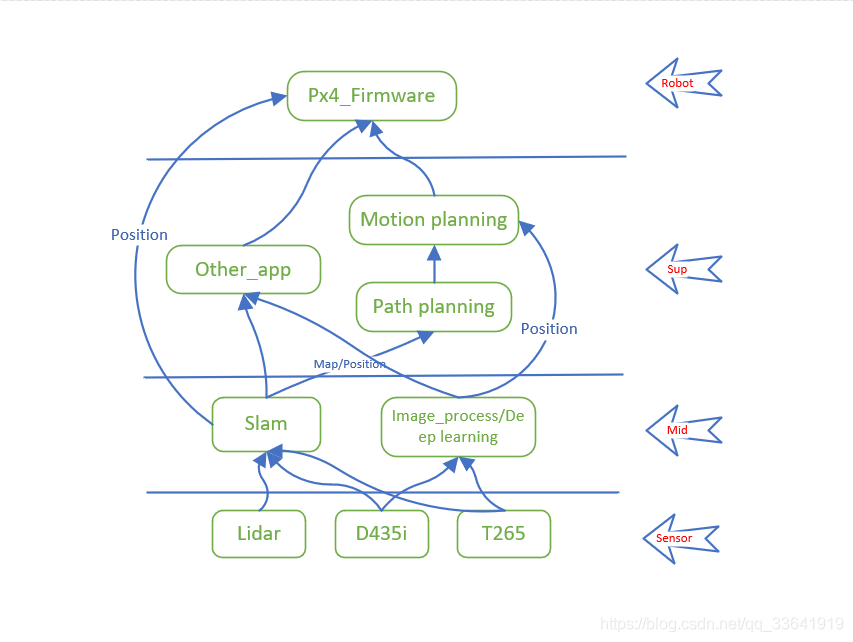
这个开源项目专门以PX4为基础进行的上层仿真开发环境的搭建,包括SLAM,MAP,IMAGE_PROCESS,PLANING,MAVROS等
其中simulation包含2D、3D激光雷达模型、深度相机模型、双目相机模型、realsense相机模型、IRlock相机模型等
此开源项目架构如下
下载编译firmware
在此目录下下载px4源码并切换v1.10.0的固件
cd volans
git clone https://github.com/PX4/Firmware
如果github上下载较慢可以下载码云中的px4源码
cd volans
git clone https://gitee.com/bingobinlw/Firmware
然后更新submodule切换固件并编译
cd Firmware
git submodule update --init --recursive
git checkout v1.10.0
make distclean
make px4_sitl_default gazebo
确保make px4_sitl_default gazebo命令执行成功
编译工作空间,运行launch文件
编译之前请先安装必要的依赖项
sudo apt-get install ros-melodic-ddynamic-reconfigure
二维码识别相关包
sudo apt-get install ros-melodic-ar-track-alvar*
3Dlidar仿真相关的插件包
sudo apt-get install ros-melodic-velodyne-gazebo-plugins
moveit运动规划相关的包
sudo apt-get install ros-melodic-moveit
sudo apt-get install ros-melodic-nav-core
编译工程
cd volans
catkin config --extend /opt/ros/${ROS_DISTRO} --cmake-args -DCMAKE_BUILD_TYPE=Release
catkin build
编译成功后运行source_environment.sh添加Firmware环境变量,volans gazebo模型路经,gazebo_modles模型路经
source source_enviroment.sh
Px4_control
px4控制以及上层应用模块
offboard 模式下走圆形轨迹
运行
roslaunch simulation circular_px4.launch
同时会出现一飞机控制界面,要想使用此脚本请先查看下面路经的README.md
dir:volans/src/simulation/scripts/README.md
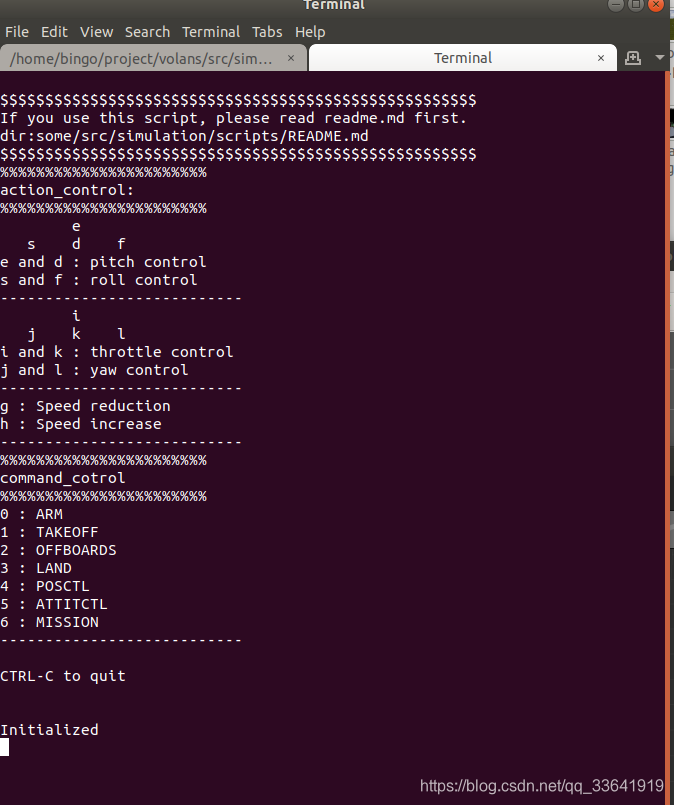
在键盘控制终端中,输入0解锁,然后输入2切offboard,飞机随后会按照你给定的半径与高度飞行,完成一圈后会自动降落。如果感觉uav速度不合适可以使用g与h
键调整
offboard 模式下进行二维VFH避障
运行demo之前,请先在QGC中添加航点,然后上传,VFH节点将读取航点信息,当作目标点。
然后重新运行
roslaunch simulation obstacle_avoidance_2Dlaser_vfh_px4.launch

中间终端为GCG中各航点的平面信息,读取航点成功后,在最后一个控制终端中输入2然后回车,VFH节点将开始工作。
Slam
运行slam-Demo之前请先安装必要的功能包,具体请到
roscd ros_slam
查看README.md
gmapping_slam
运行
roslaunch simulation gmapping_demo_px4.launch
cartographer
cartographer在2019年10月份已经支持以ros包形式安装。若想运行此demo请先安装必要cartogra包。具体请看ros_slam包中的README.md
2Dlidar location
运行demo之前请先在QGC参数表中配置参数,选择EKF位置来源来自板载计算机
EKF2_AID_MASK = 24
cartogra节点将接收2d激光雷达以及无人机的imu话题。
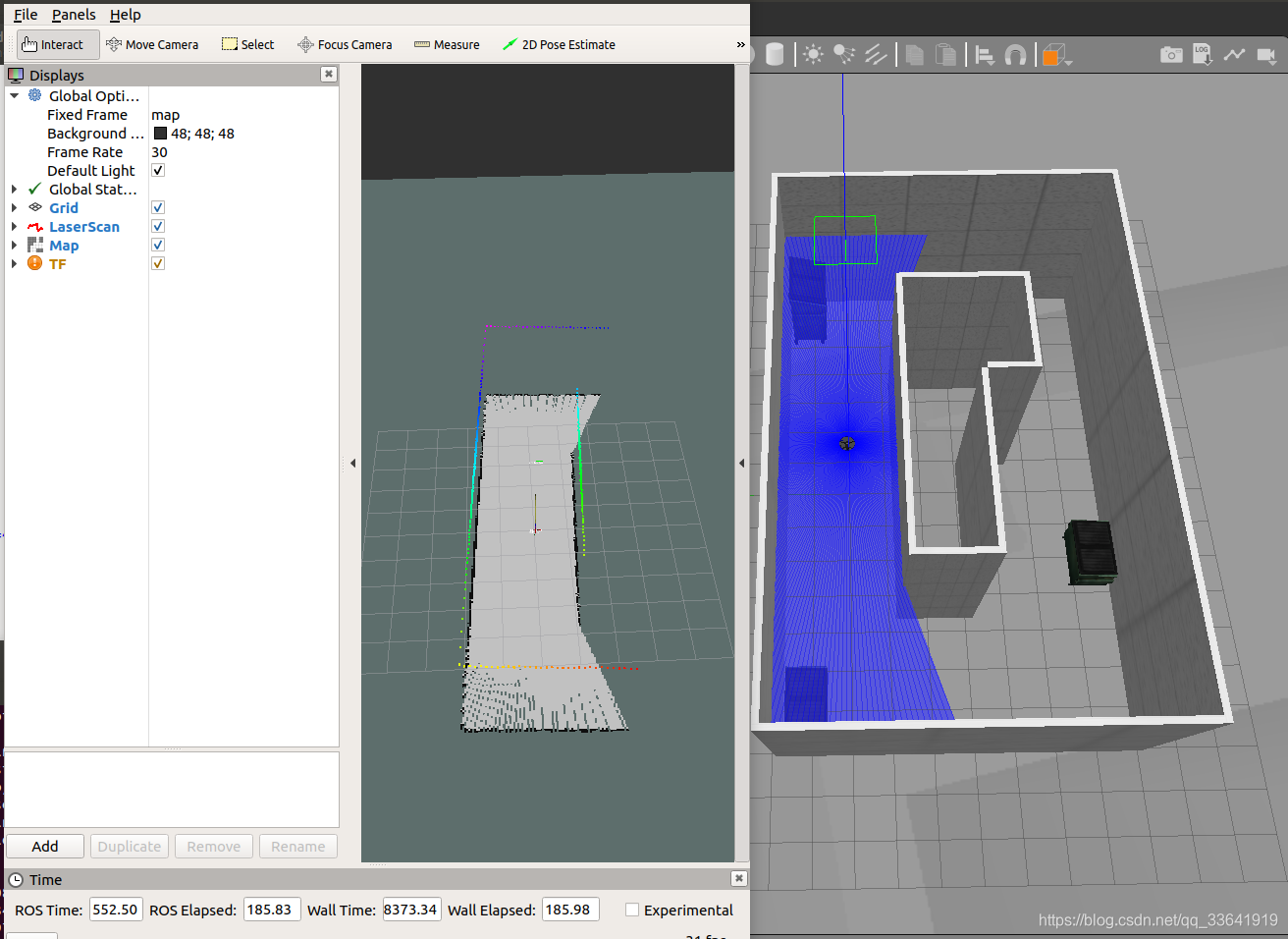
roslaunch simulation cartographer2Dlidar_location_demo_px4.launch
在定位之前请在键盘控制界面用键盘的g键调整uav的允许速度为1570,降低uav的运动时的倾斜角度以及速度,以达到更好的定位效果。
结果

2Dlidar mapping
如果你想建立更加准确的地图,而且你的robot已经拥有里程计。那么cartogra能够生成准切而稳定的map,不会存在location模式中地图会飘的情况。
运行demo之前请先在QGC参数表中配置参数,选择EKF位置来源来自gps
EKF2_AID_MASK = 1
cartogra节点将接收2d激光雷达以及无人机的里程计话题
roslaunch simulation cartographer2Dlidar_mapping_demo_px4.launch
3Dlidar location
使用运行demo之前请先确保以安装3D雷达相关插件
for ubuntu 18.04
sudo apt-get install ros-melodic-velodyne-gazebo-plugins
使用一个16线的激光雷达,以及一个imu数据,激光雷达水平安装在飞机的顶部。就其定位效果来看,没有发现2Dlidar定位时会飘的情况,而且无人机速度倾斜角度都可以大幅提高。
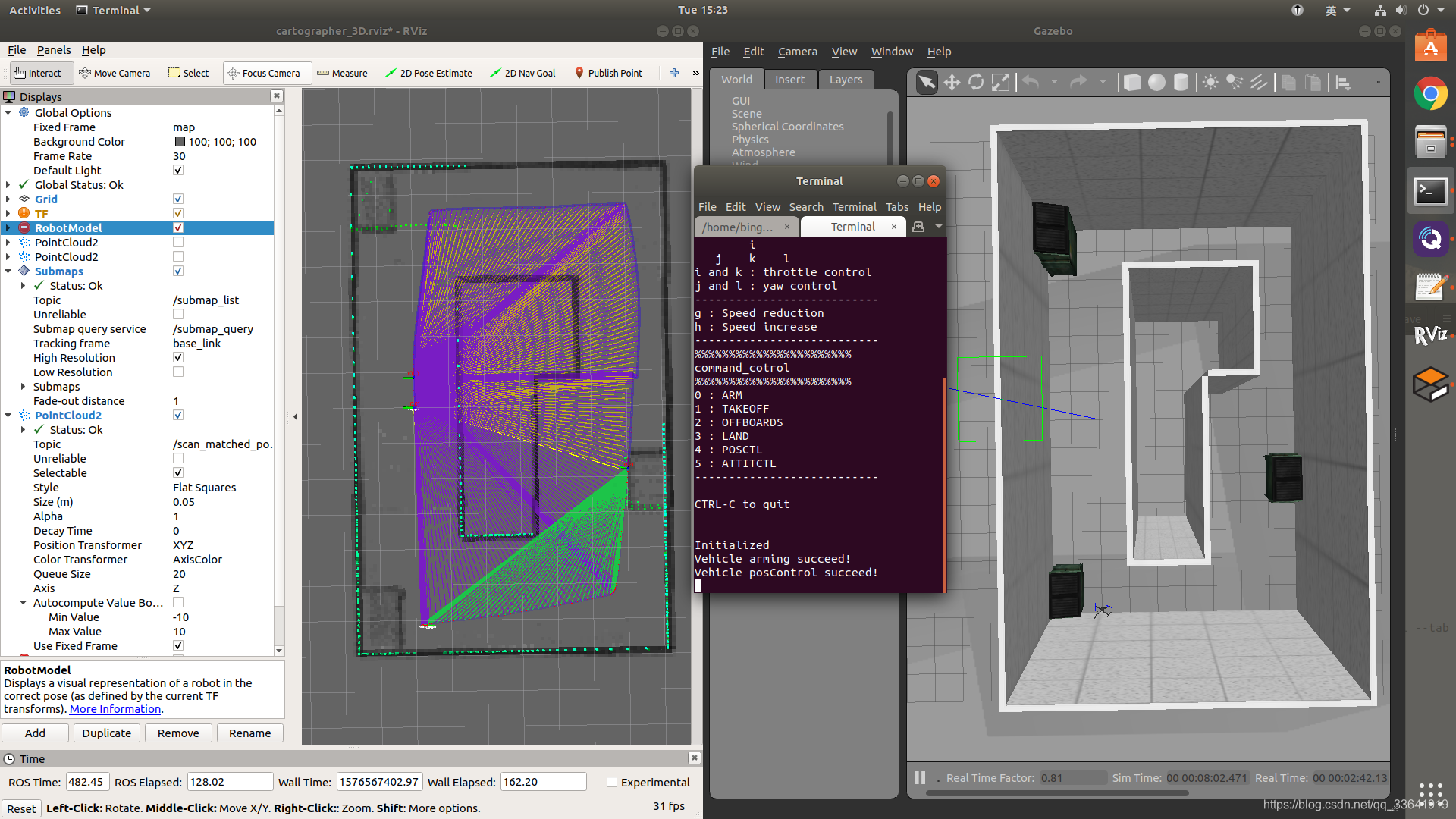
运行
roslaunch simulation cartographer3Dlidar_demo_px4.launch
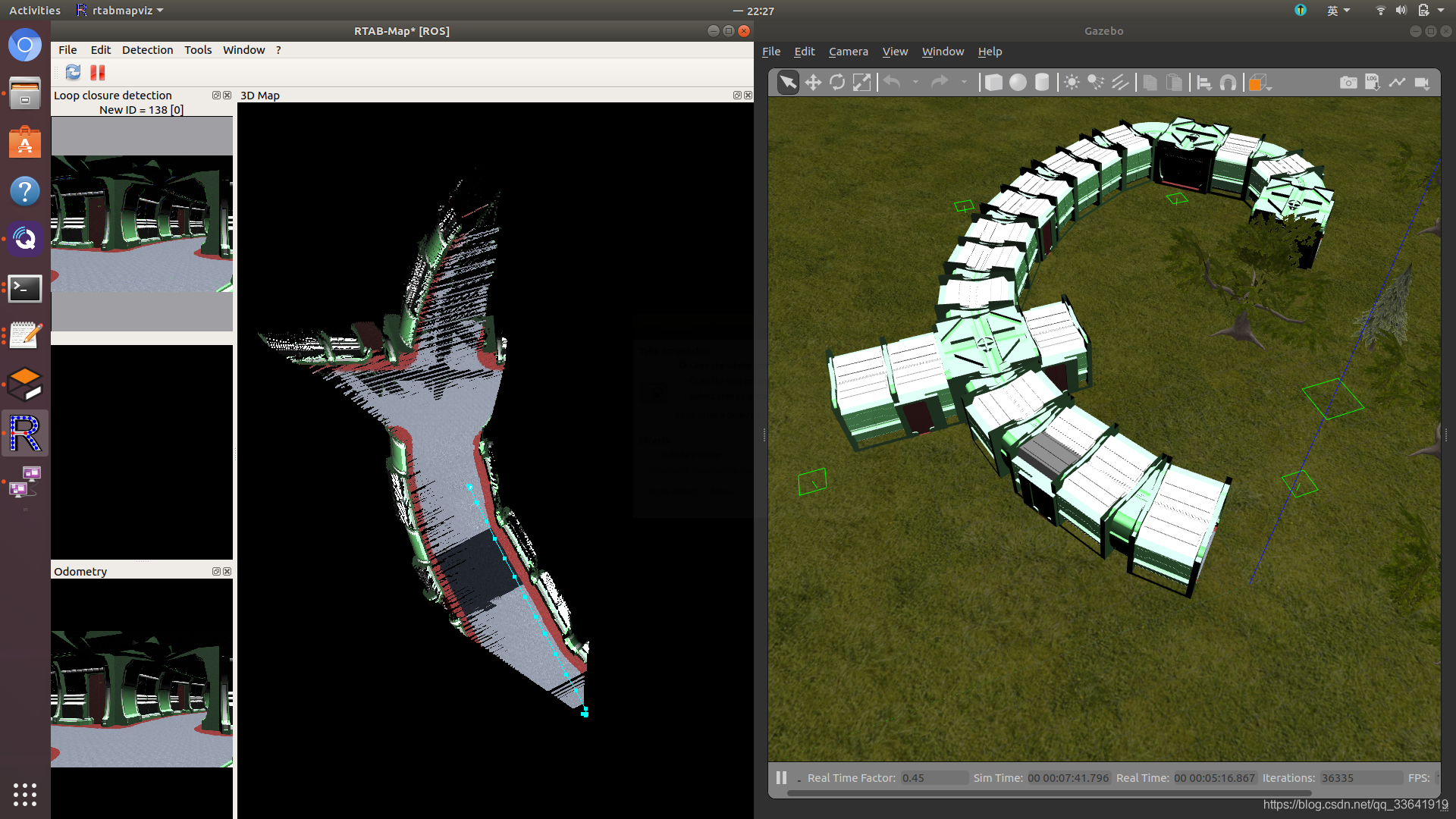
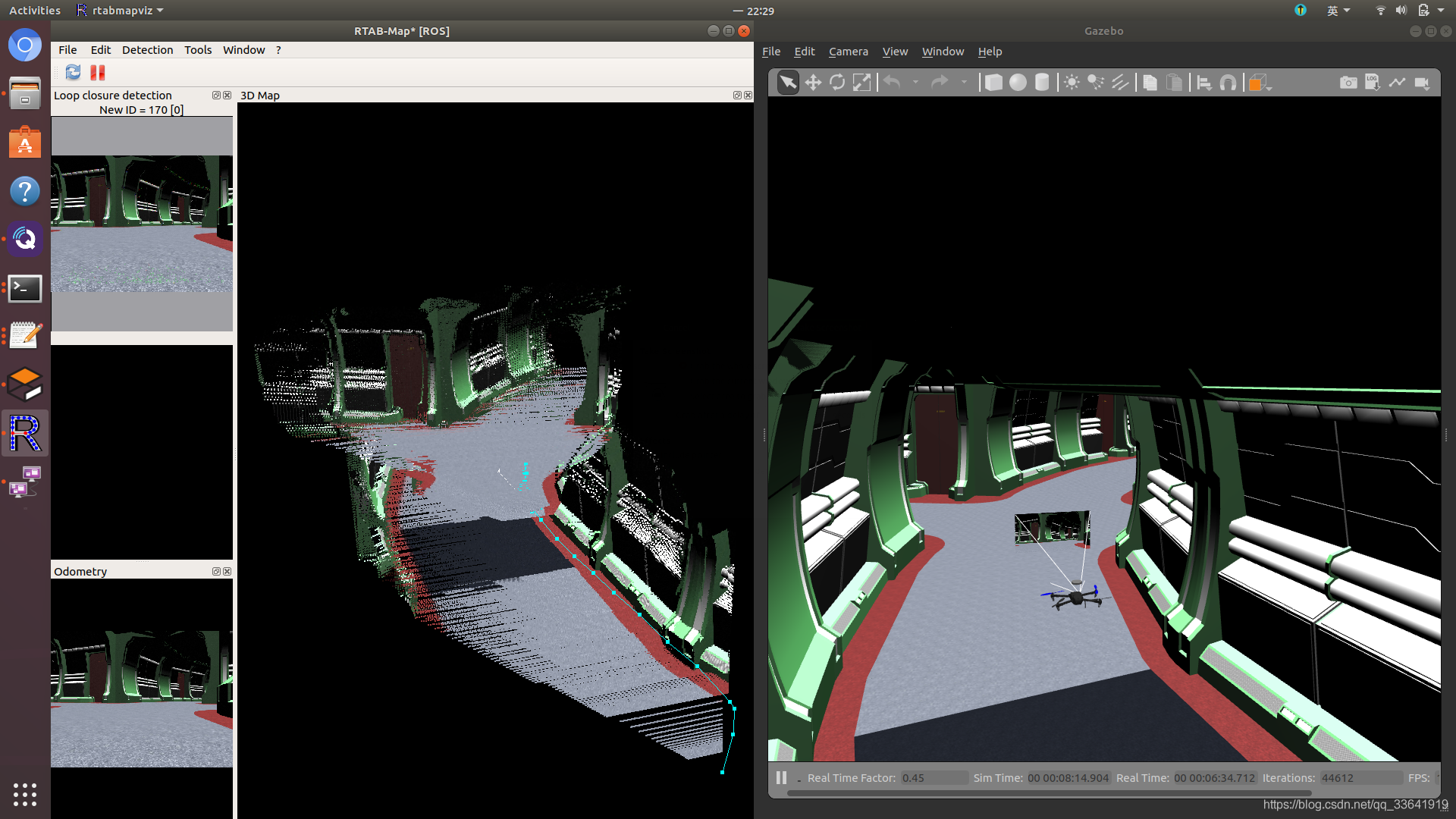
rtabmap slam
使用深度相机以及室内里程计,为了达到更好的建图效果,其中室内里程计选择用3Dcartogra.
运行demo之前请先安装必要的rtabmap ros包
sudo apt-get install ros-melodic-rtabmap-ros
请先在QGC参数表中配置参数,选择EKF位置来源来自板载计算机
EKF2_AID_MASK = 24
运行demo
roslaunch simulation rtabmap_depthCam_mapping_demo_px4.launch
参考于:http://wiki.ros.org/rtabmap_ros
建图效果:
Map
运行map-Demo之前请先安装必要的功能包,具体请看
roscd octomap
查看README.md
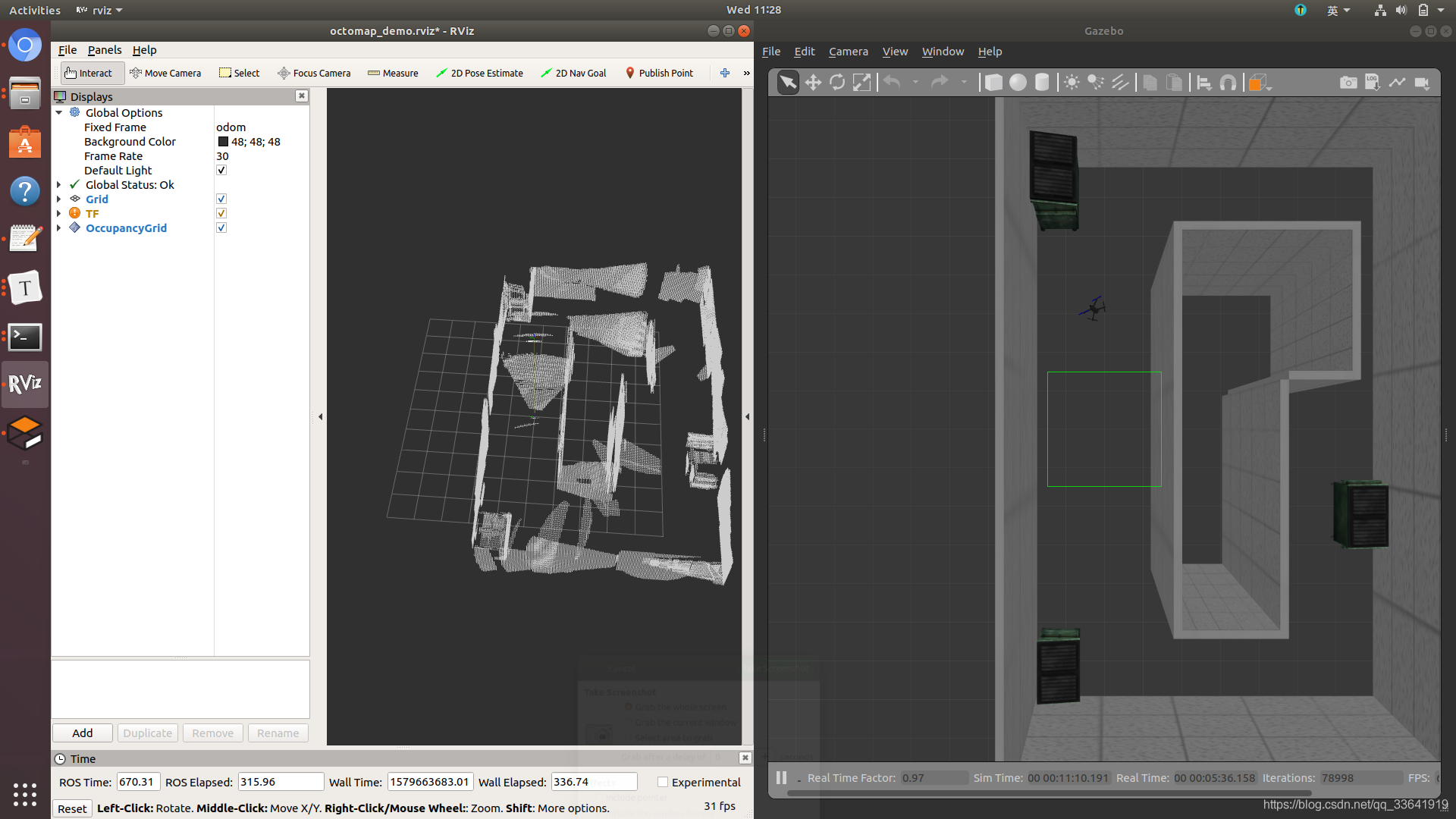
octomap
depth camera
运行
roslaunch simulation octomap_px4.launch
建图效果
3Dlidar
运行
roslaunch octomap_3Dlidar_px4.launch
建图效果

Image_process
vision landing
二维码降落

运行demo之前请先安装必要的ros包
sudo apt-get install ros-melodic-ar-track-alvar*
运行
roslaunch simulation landing_px4.launch
然后在键盘控制界面输入’0’ 解锁,输入’2’切入OFFBOARD,飞机会自动起飞降落到目标板。
视频链接:landding vision
vision tracking
二维码跟踪

运行
roslaunch simulation tracking_px4.launch
然后在键盘控制界面输入’0’ 解锁,输入’2’切入OFFBOARD,然后在转入gazebo界面输入键盘的“w a s d”可控制汽车移动。
Planning
ros navigation
运行demo之前请先安装必要的导航包
sudo apt-get install ros-melodic-navigation
运行
roslaunch simulation ros_2Dnav_demo_px4.launch
在键盘控制界面解锁无人机,并控制无人机起飞
然后在rviz界面使用2D Nav Goal 设置目标点,
然后在键盘控制界面输入2运行offboard模式。

参考于:http://wiki.ros.org/navigation
视频链接:px4 ros navigation
注:有任何疑问都可在issues提问:)




