首先感谢古月居提供笔者本次参与机器人云实践平台测试的机会。 通过下方简短的视频让我们直观感受该云实践平台的操作。 ……继续阅读 » 吴凯荣 5年前 (2021-04-26) 2663浏览 0评论2263个赞
实验方法将 Robot Application 配成 e……继续阅读 » IBN_Blank 5年前 (2021-04-26) 2832浏览 0评论297个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3514浏览 0评论1742个赞
20 霍夫圆检测 1 原理简介 2 相关API①原理简介 对于笛卡尔坐标系中圆的方程……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3039浏览 0评论943个赞
……继续阅读 » zhangrelay 5年前 (2021-04-26) 2919浏览 0评论2394个赞
运行结果 ……继续阅读 » 一三五 5年前 (2021-04-26) 2814浏览 0评论1430个赞
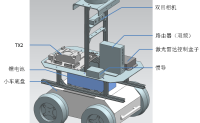
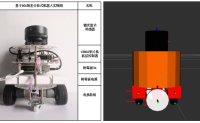
1.引言 本着为大家谋福利的心态,根据自己以往的开发经验,打算写一个从零开始制作一个可以实现地图构建和导航的ROS小车。目前某宝上面有很多现成产品,但是我个……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3236浏览 0评论757个赞
上一篇博客我们介绍了ROS试验车的结构设计(三维模型)和部分通讯设计。上篇博客中通讯设计主要介绍了使用ROS系统进行12V10Ah和12V20Ah锂电池的通讯。 我们的目标是设计一套完整的的……继续阅读 » 一三五 5年前 (2021-04-26) 2405浏览 0评论1987个赞
前言 之前用turtlebot仿真过巡线机器人,但是turtlebot略显笨重,为了纪念下本科参加的飞思卡尔,尝试着做一套ROS的仿真SmartCar。 ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2765浏览 0评论257个赞
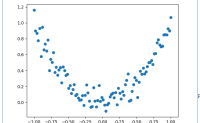
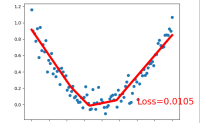
基于tensorflow的一元线性回归详细讲解 官方代码: https://github.com/MorvanZhou/Tensorflow-Tutorial/blob/master/tutoria……继续阅读 » 一三五 5年前 (2021-04-26) 1568浏览 0评论1880个赞
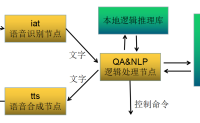
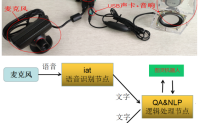
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: 1.语音交互相关技术 2.机器人语音交互实现 3.自然语言处理云计算……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2997浏览 0评论419个赞
新一学年开学在即,多半年都没进过实验室的同学们要疯狂滴补“动手实战”; 推迟了几个月的全国大学生电子设计竞赛(今年是省赛)还有一个多月就开赛,不少同学都在为大学四年最重要的一个赛事冲刺; 正巧今天TI发布了今年省赛的器件清单: ……继续阅读 » 电子森林 5年前 (2021-04-26) 1870浏览 0评论1224个赞
搭建ROS小车真的难吗?不难……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1909浏览 0评论2291个赞
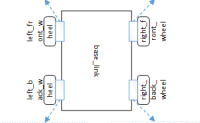
ROS小车的软件结构0……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2817浏览 0评论2102个赞
2.1 STM32电机PWM控制 我们这里提供左右两个电机PWM控制代码,在公众号:小白学移……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2387浏览 0评论2756个赞
2.2 STM32电机测速(正交或者霍尔编码器) 我们这里提供左右电机测速代码,在公……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1944浏览 0评论2378个赞
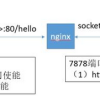
也许你在学习各类计算机编程语言的时候,第一个程序就是Hello World! 延续传统,在本次机器人云实践平台的测试中,官方也为我们提供了示教例程,本文将讲述基于官方示教例程实验云平台的过程。 ……继续阅读 » 吴凯荣 5年前 (2021-04-26) 3221浏览 0评论163个赞
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: 1.语音交互相关技术 2.机器人语音交互实现 3.自然语言处理云计算……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3263浏览 0评论2973个赞
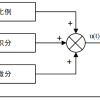
2.3 STM32电机PID速度控制 之前的文章,完成了直流减速电机的PWM控制、电机测速。本篇文章,将……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1960浏览 0评论2007个赞
前言 上一篇博客:ros机器人编程实践(16.1)- 仿真SmartCar之搭建模型 上一章已经成功搭建SmartCar模型,这一章在基础上做一些优化,并让他跑起来<……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1900浏览 0评论1919个赞
2.4 STM32 MPU6050数据获取(IIC + DMP……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2330浏览 0评论1272个赞
ROS机器人:全网最实用的STM32和ROS的串口通信方案……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3172浏览 0评论2124个赞
TF坐标变换基础 机器人建模和控制必须掌握坐标系和坐标变换等基础知识。机器人在空间中运动主要有两种形式: 平移和旋转 也就是线速度和角速度……继续阅读 » zhangrelay 5年前 (2021-04-26) 2546浏览 0评论1774个赞
2.6 ROS小车STM32底层控制代码 经过之前几篇文章,我相信大家一定对下面这些模块都已经有些了……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2861浏览 0评论1872个赞
上一篇文章 “高效实战及电赛训练……继续阅读 » 电子森林 5年前 (2021-04-26) 2614浏览 0评论1582个赞
嗨伙计们,忙到爆炸的月更侠罗伯特祥又来和大家见面了!今天我们来聊聊协作机器人中柔顺控制那点事儿~ 我们先来讲下本次文章的安排,首先我们要在webots中建立一个连杆模型,然后我们需要对它进行动力学建模,基于这个模型,我们通过阻抗控制使它呈现出一个柔顺的效果! &nb……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3308浏览 0评论1853个赞
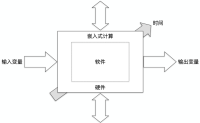
上节讲了用MCU构成的数字系统的MCU选用及资源利用。关于MCU的编程就不再赘述,就跟不同的人每天要做的事情不同一样,千差万别,靠自己去按照逻辑流程去写就是。 MCU作……继续阅读 » 电子森林 5年前 (2021-04-26) 1812浏览 0评论2065个赞
ROS2的相关课程第一次开设的时间是在2017年的“智能机器人技术综合实训课程说明”(2017-2018-1学期)。当时以一个专题的形式进行简要介绍,2018年扩展了安装、基础、导航等内容(2018-2019-1学期)。The ROS2 course was first held……继续阅读 » zhangrelay 5年前 (2021-04-26) 3046浏览 0评论2382个赞
是时候放下ROS1,开启ROS2的旅程了。It’s time to put down ROS1 and start the journey of ROS2. ROS2官方在线文档链接 ROS2 official online documentation:https:……继续阅读 » zhangrelay 5年前 (2021-04-26) 3475浏览 0评论453个赞
上一篇文章 “高效实战及电赛训练(2)- 数字系统的“控制”和“处理””中我简单介绍了一下构成数字系统核心的几种方式: 微控制器MCU – 通过编程用指令来控制,比……继续阅读 » 电子森林 5年前 (2021-04-26) 2246浏览 0评论267个赞
这里要偷懒了,都是已经发过的博文,在此列一下。Because these are blogs that have been published before, so just list them here. 桌面机器人:Desktop robot: Cozmo+ROS2:http……继续阅读 » zhangrelay 5年前 (2021-04-26) 2363浏览 0评论2434个赞
……继续阅读 » 9easy_2690 5年前 (2021-04-26) 3103浏览 0评论2122个赞
官方代码: https://github.……继续阅读 » 一三五 5年前 (2021-04-26) 2127浏览 0评论1653个赞
非常感谢古月居提供的这次参与内测的机会。 AWS RoboMaker概述 AWS RoboMaker 提供基于云端的机器人应用程序(包括ROS2)开发环境、模拟环境,可以方便的通过浏览器在云端……继续阅读 » Tong 5年前 (2021-04-26) 3047浏览 0评论1434个赞
物联网时代,作为对物理世界进行感知的传感器必不可少,每一种传感器的出现和有效利用都帮助我们对世界增加一个角度的认知。从古老的麦克风、摄像头、温度计到现在电赛中必用的姿态传感器、位置传感器等等,琳琅满目,种类繁多。 我们的处理器接受的外界信号除了按键、开关之外(参见上……继续阅读 » 电子森林 5年前 (2021-04-26) 3265浏览 0评论1503个赞
AWS RoboMaker入门(一)……继续阅读 » 一凡 5年前 (2021-04-26) 1724浏览 0评论2700个赞
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: ……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3401浏览 0评论760个赞
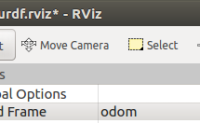
前言 上一篇博客:ros机器人编程实践(16.2)- 仿真SmartCar之模型“飞起来“ 上一章我们将模型导入到rv……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3010浏览 0评论2531个赞
在完成对云实践平台的熟悉后,内测的第二部分实验是SLAM建图和导航。 首先在建立开发项目前,需要创建开发环境,由于内测用户每个账号可以创建两个开发环境,所以这时我新建了一个开发环境。完成创建,进入开发IDE后,我们可以在开发环境主文件夹下新建项目文件夹,每个项目应包……继续阅读 » 9easy_2690 5年前 (2021-04-26) 2892浏览 0评论127个赞
tensorflow的CNN ……继续阅读 » 一三五 5年前 (2021-04-26) 1766浏览 0评论2127个赞
AWS RoboMaker入门(二)……继续阅读 » 一凡 5年前 (2021-04-26) 2894浏览 0评论1389个赞
AWS RoboMaker Hello World 运行分为两部分,先是通过实例应用程序运行 Hello World 模拟作业,再就是进入实际开发环境,通过代码运行,启动模拟作业。 实例应用程序 Hello World……继续阅读 » Tong 5年前 (2021-04-26) 3350浏览 0评论1910个赞
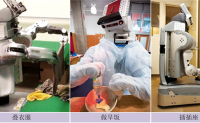
参考代码:https://github.com/tork-a/jog_control.git 将参考代码功能包放置到自己机械臂功能包同一目录下。在工作空间进行编译catkin_make编译可能遇到的两个问题: 1)缺少fake-jo……继续阅读 » 搁浅 5年前 (2021-04-26) 2927浏览 0评论811个赞
0.安装步骤预览 (1)系统默认自带python2.x,所以需要先安装python3.x (2)python2对应pip,python3对应pip3,用源码安装python3后pip3也自动安装了 (3)用pip3安装virtualenv (4)用virtual……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2154浏览 0评论1929个赞
android要与ROS通讯,一种是基于rosbridge,另一种是基于rosjava库。 相关参考例子工程 ……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1907浏览 0评论2706个赞