平台:ubuntu18.04、TX2、Python3.6 写在前面 目前经过测试TX2上是带有串口通讯驱动的,我们只需要设置一下即可。本次主要讲解如何使用USB转RS232的串口通讯。 由于USB转RS232可使用不同的芯片,自然包含各种各样的驱……继续阅读 » 5年前 (2021-04-26) 2737浏览 0评论687个赞
需求:TX2连接Lidar获取点云数据,由于TX2安装在机器人上,不能外接屏幕,内存ROM也很小,所以采用TX2与雷达建立通讯,然后建立TX2和PC机的ROS远程通讯(PC机和TX2都安装ubuntu18.04) PC机和TX2全部为系统为18.04,ROS版本全部为melodi……继续阅读 » 5年前 (2021-04-26) 3215浏览 0评论1987个赞
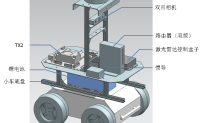
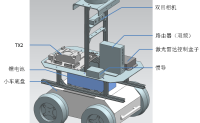
1、试验车的结构设计 试验车三维结构示意图如图1所示。试验车采用铝合金支架连接,因铝合金质量较轻,不仅可满足试验车最大承重要求,采用支架结构还有利于以后的试验车结构上的扩展。试验车上包含的传感器有:三维激光雷达、惯导、路由器、T……继续阅读 » 5年前 (2021-04-26) 3445浏览 0评论2244个赞
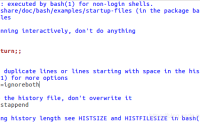
运行环境: ubuntu18.04、python3.6、tkinter 运行效果: 开机之后自动打开teminal并执行设定好的程序,进入系统后每次打开terminal都会执行一次设定的程序。……继续阅读 » 5年前 (2021-04-26) 2121浏览 0评论1449个赞
1、卸載低版本 先查看是否已經安裝cmake cmake --version 如果安裝了,並……继续阅读 » 5年前 (2021-04-26) 1690浏览 0评论1911个赞
Ubuntu18.04安装ROS的版本为ros-melodic Ubuntu16.04安装ROS的版本为ros-kinetic……继续阅读 » 5年前 (2021-04-26) 3506浏览 0评论2578个赞
安装软件源 包安装方法主要有两种:软件源安装和源码编译安装。软件源(Repository)为系统提供了一个庞大的应用程序仓库,只要通过简单的命令即可从仓库中找到需要安装的软件并完成下载安装。相反,源码编译安装相对来说比较复杂,需要手动解决软件的依赖关系。……继续阅读 » 5年前 (2021-04-26) 2880浏览 0评论2142个赞
rosbag既可以指命令行中数据包相关命令,也可以指 c++/pythond的 rosbag 库。……继续阅读 » 5年前 (2021-04-26) 2023浏览 0评论526个赞
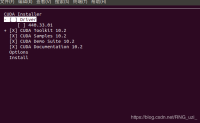
修正:Ubuntu 18.04+RTX2080Ti建议安装cuda10.0,cudnn7.5.1,pytorch1.4.0+cu100 / torchvision0.5.0+cu100,tensorflow-gpu1.14.0 修正日期:20200611 安装方式与……继续阅读 » 5年前 (2021-04-26) 2594浏览 0评论2383个赞
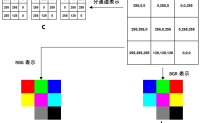
前言: 本文中,主要是关于OpenCV格式图片(或视频帧)和ROS数据格式图片(或视频帧)之间的转换。或者直白点书,通过ROS发送图片(Image)数据类型的消息(message)。 本文其实是为……继续阅读 » 5年前 (2021-04-26) 2182浏览 0评论2957个赞
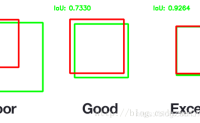
1. IOU(Intersection over Union) -交并比 IOU是一种测量在特定数据集中检测相应物体准确度的一个标准。在PASCAL VOC chall……继续阅读 » 5年前 (2021-04-26) 2615浏览 0评论1342个赞
pytorch 利用tensorboard显示loss,acc曲线等 运行环境: python3.6.9 pytor……继续阅读 » 5年前 (2021-04-26) 3037浏览 0评论2728个赞
pointnet训练文件pointnet/sem_seg/train.py注释 原文如下: import argp……继续阅读 » 5年前 (2021-04-26) 2161浏览 0评论2966个赞
效果: 卡顿现象严重,初步显示还行,后期需要寻找其他显示方法 ……继续阅读 » 5年前 (2021-04-26) 3210浏览 0评论2223个赞
先挖个坑:实现基于python的DFS,BFS ……继续阅读 » 5年前 (2021-04-26) 3341浏览 0评论705个赞
matplotlib生成三维点云包围盒 运行环境: win10、 python3.5.2、 matplotlib 评价:消耗时间较长 效果展示: ……继续阅读 » 5年前 (2021-04-26) 1875浏览 0评论1454个赞
原图像: ……继续阅读 » 5年前 (2021-04-26) 2304浏览 0评论1750个赞
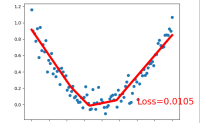
之前只是简单了解RANSAC模型,知道它是干什么的。然后今天有个课程设计的报告,上去讲了一下RANSAC,感觉这个东西也没那么复杂,所以今天就总结一些RASAC并用Python实现一下直线拟合。 ……继续阅读 » 5年前 (2021-04-26) 2327浏览 0评论1991个赞
学习打开摄像头捕获照片、播放本地视频、录制视频等。 目标: 打开摄像头并捕获照片 播放本地视频,录制视频 OpenCV函数:cv2.VideoCapture(), cv2.Vid……继续阅读 » 5年前 (2021-04-26) 3495浏览 0评论1783个赞
将视频按照一定的帧率转化为图片,与PotPlayer进行对比,发现相同的设置,本文代码比PotPlayer保存的图片清晰度高。 代码如下: #-*- c……继续阅读 » 5年前 (2021-04-26) 2846浏览 0评论2369个赞
参考文章:https://www.cnblogs.com/shizhengwen/p/8719062.html一、读入图像……继续阅读 » 5年前 (2021-04-26) 2624浏览 0评论2276个赞
opencv单独打开摄像头或者打开本地视频请参考:《Python+OpenCV教程3:打开摄像头》 本篇介绍在pyqt中打开摄像头并进行显示,……继续阅读 » 5年前 (2021-04-26) 2828浏览 0评论1183个赞
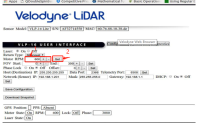
参考文献: http://wiki.ros.org/velodyne/Tutorials/Getting%20Started%20with%20the%20Velodyne%20VLP16 https://blog.csdn.net/zz2862625……继续阅读 » 5年前 (2021-04-26) 1899浏览 0评论268个赞
TensorFlow处理数据常用套路 ……继续阅读 » 5年前 (2021-04-26) 2907浏览 0评论1128个赞
tensorflow的RNN(递归神经网络) 运行结果 ……继续阅读 » 5年前 (2021-04-26) 3524浏览 0评论1456个赞
tensorflow的dropout 防止过拟合 原文链接:https://github.com/MorvanZhou/Tensorflow-Tutorial 训练前自己的数据 ……继续阅读 » 5年前 (2021-04-26) 3635浏览 0评论2038个赞
运行结果 ……继续阅读 » 5年前 (2021-04-26) 1920浏览 0评论1338个赞
上一篇博客我们介绍了ROS试验车的结构设计(三维模型)和部分通讯设计。上篇博客中通讯设计主要介绍了使用ROS系统进行12V10Ah和12V20Ah锂电池的通讯。 我们的目标是设计一套完整的的……继续阅读 » 5年前 (2021-04-26) 3009浏览 0评论582个赞
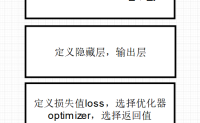
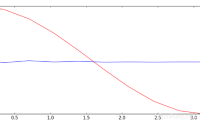
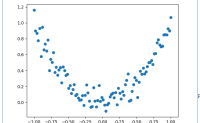
基于tensorflow的一元线性回归详细讲解 官方代码: https://github.com/MorvanZhou/Tensorflow-Tutorial/blob/master/tutoria……继续阅读 » 5年前 (2021-04-26) 2191浏览 0评论1151个赞
官方代码: https://github.……继续阅读 » 5年前 (2021-04-26) 1909浏览 0评论2562个赞
tensorflow的CNN ……继续阅读 » 5年前 (2021-04-26) 2524浏览 0评论2506个赞